 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData Distribution Shifts in (Industrial) Federated Learning as a Privacy Issue
Sep 20, 2024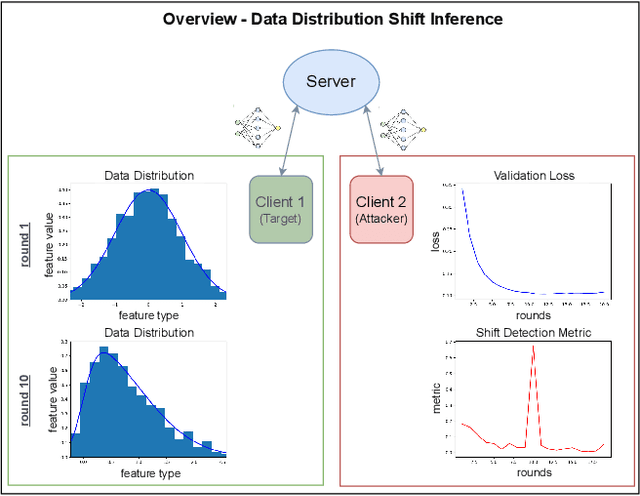



We consider industrial federated learning, a collaboration between a small number of powerful, potentially competing industrial players, mediated by a third party aspiring to improve the service it provides to its customers. We argue that this configuration harbours covert privacy risks that do not arise in e.g. cross-device settings. Companies are very protective of their intellectual property and production processes. Information about changes to their production and the timing of which is to be kept private. We study a scenario in which one of the collaborators infers changes to their competitors' production by detecting potentially subtle temporal data distribution shifts. In this framing, a data distribution shift is always problematic, even if it has no negative effect on training convergence. Thus, our goal is to find means that allow the detection of distributional shifts better than customary evaluation metrics. Based on the assumption that even minor shifts translate into the collaboratively learned machine learning model, the attacker tracks the shared models' internal state with a selection of metrics from literature in order to pick up on relevant changes. In an empirical study on benchmark datasets, we show an honest-but-curious attacker to be capable of detecting subtle distributional shifts on other clients, in some cases long before they become obvious in evaluation.
Pilot-Based SFO Estimation for Bistatic Integrated Sensing and Communication
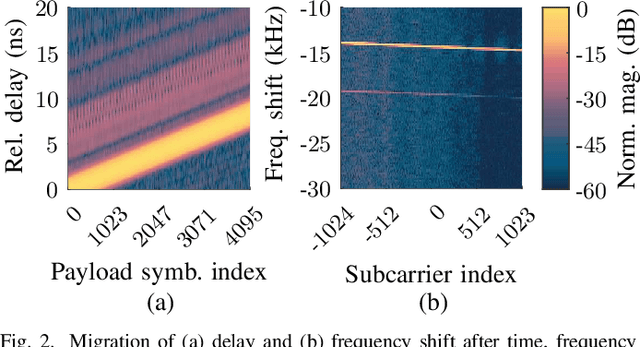
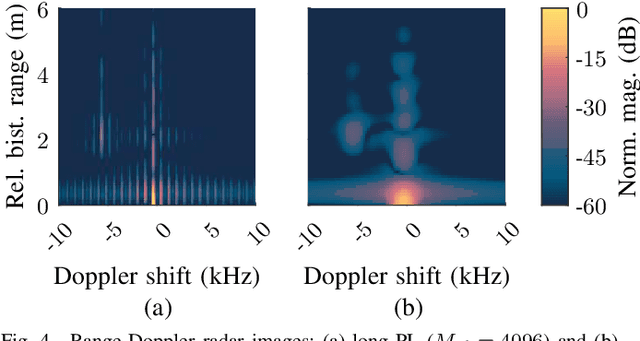
Jul 10, 2024Enabling bistatic radar sensing within the context of integrated sensing and communication (ISAC) for future sixth generation mobile networks demands strict synchronization accuracy, which is particularly challenging to be achieved with over-the-air synchronization. Existing algorithms handle time and frequency offsets adequately, but provide insufficiently accurate sampling frequency offset (SFO) estimates that result in degradation of obtained radar images in the form of signal-to-noise ratio loss and migration of range and Doppler shift. This article introduces an SFO estimation algorithm named tilt inference of time offset (TITO) for orthogonal frequency-division multiplexing (OFDM)-based ISAC. Using available pilot subcarriers, TITO obtains channel impulse response estimates and extracts information on the SFO-induced delay migration to a dominant reference path with constant range, Doppler shift, and angle between transmit and receive ISAC nodes. TITO then adaptively selects the delay estimates that are only negligibly impaired by SFO-induced intersymbol interference, ultimately employing them to estimate the SFO. Assuming a scenario without a direct line-of-sight (LoS) between the aforementioned transmitting and receiving ISAC nodes, a system concept with a relay reflective intelligent surface (RIS) is used to create the aforementioned reference path is proposed. Besides a mathematical derivation of accuracy bounds, simulation and measurements at 26.2 GHz are presented to demonstrate TITO's superiority over existing methods in terms of SFO estimation accuracy and robustness.
Bistatic OFDM-based ISAC with Over-the-Air Synchronization: System Concept and Performance Analysis
May 08, 2024



Integrated sensing and communication (ISAC) has been defined as one goal for 6G mobile communication systems. In this context, this article introduces a bistatic ISAC system based on orthogonal frequency-division multiplexing (OFDM). While the bistatic architecture brings advantages such as not demanding full duplex operation with respect to the monostatic one, the need for synchronizing transmitter and receiver is imposed. In this context, this article introuces a bistatic ISAC signal processing framework where an incoming OFDM-based ISAC signal undergoes over-the-air synchronization based on preamble symbols and pilots. Afterwards, bistatic radar processing is performed using either only pilot subcarriers or the full OFDM frame. The latter approach requires estimation of the originally transmitted frame based on communication processing and therefore error-free communication, which can be achieved via appropriate channel coding. The performance and limitations of the introduced system based on both aforementioned approaches are assessed via an analysis of the impact of residual synchronization mismatches and data decoding failures on both communication and radar performances. Finally, the performed analyses are validated by proof-of-concept measurement results.
Bistatic OFDM-based Joint Radar-Communication: Synchronization, Data Communication and Sensing
May 24, 2023

This article introduces a bistatic joint radar-communication (RadCom) system based on orthogonal frequency-division multiplexing (OFDM). In this context, the adopted OFDM frame structure is described and system model encompassing time, frequency, and sampling synchronization mismatches between the transmitter and receiver of the bistatic system is outlined. Next, the signal processing approaches for synchronization and communication are discussed, and radar sensing processing approaches using either only pilots or a reconstructed OFDM frame based on the estimated receive communication data are presented. Finally, proof-of-concept measurement results are presented to validate the investigated system and a trade-off between frame size and the performance of the aforementioned processing steps is observed.