 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBistatic OFDM-based ISAC with Over-the-Air Synchronization: System Concept and Performance Analysis
May 08, 2024



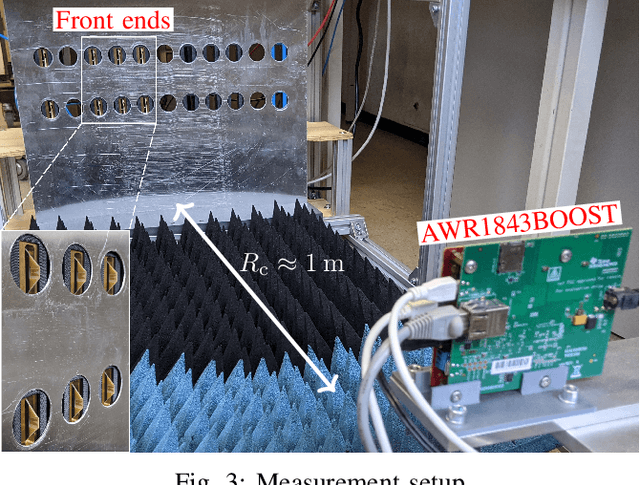
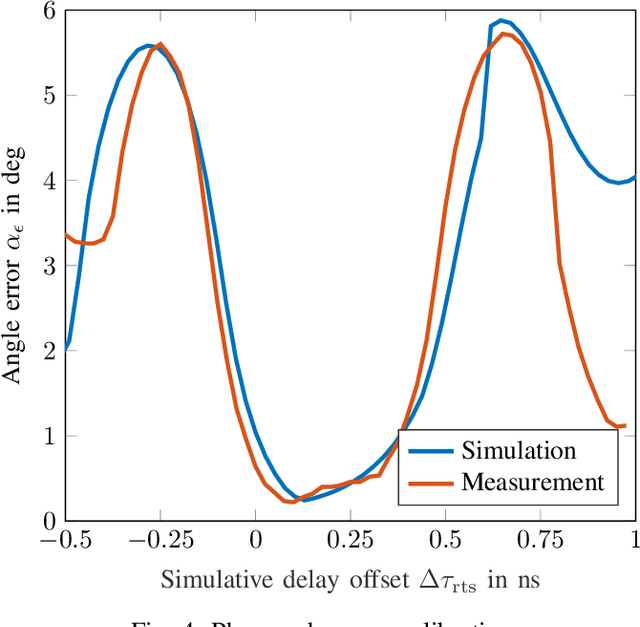
Integrated sensing and communication (ISAC) has been defined as one goal for 6G mobile communication systems. In this context, this article introduces a bistatic ISAC system based on orthogonal frequency-division multiplexing (OFDM). While the bistatic architecture brings advantages such as not demanding full duplex operation with respect to the monostatic one, the need for synchronizing transmitter and receiver is imposed. In this context, this article introuces a bistatic ISAC signal processing framework where an incoming OFDM-based ISAC signal undergoes over-the-air synchronization based on preamble symbols and pilots. Afterwards, bistatic radar processing is performed using either only pilot subcarriers or the full OFDM frame. The latter approach requires estimation of the originally transmitted frame based on communication processing and therefore error-free communication, which can be achieved via appropriate channel coding. The performance and limitations of the introduced system based on both aforementioned approaches are assessed via an analysis of the impact of residual synchronization mismatches and data decoding failures on both communication and radar performances. Finally, the performed analyses are validated by proof-of-concept measurement results.
Bistatic OFDM-based Joint Radar-Communication: Synchronization, Data Communication and Sensing
May 24, 2023
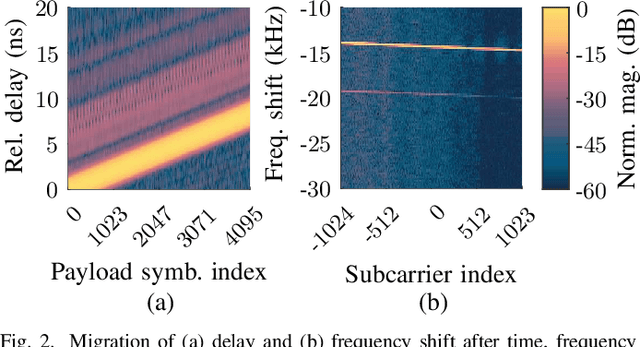

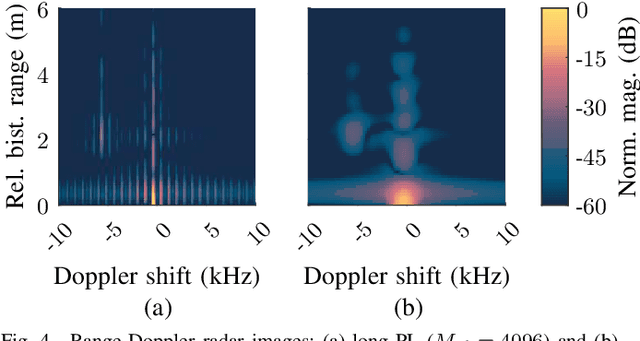
This article introduces a bistatic joint radar-communication (RadCom) system based on orthogonal frequency-division multiplexing (OFDM). In this context, the adopted OFDM frame structure is described and system model encompassing time, frequency, and sampling synchronization mismatches between the transmitter and receiver of the bistatic system is outlined. Next, the signal processing approaches for synchronization and communication are discussed, and radar sensing processing approaches using either only pilots or a reconstructed OFDM frame based on the estimated receive communication data are presented. Finally, proof-of-concept measurement results are presented to validate the investigated system and a trade-off between frame size and the performance of the aforementioned processing steps is observed.
Enabling Joint Radar-Communication Operation in Shift Register-Based PMCW Radars
May 24, 2023This article introduces adaptations to the conventional frame structure in binary phase-modulated continuous wave (PMCW) radars with sequence generation via linear-feedbck shift registers and additional processing steps to enable joint radar-communication (RadCom) operation. In this context, a preamble structure based on pseudorandom binary sequences (PRBSs) that is compatible with existing synchronization algorithms is outlined, and the allocation of pilot PRBS blocks is discussed. Finally, results from proof-of-concept measurements are presented to illustrate the effects of the choice of system and signal parameters and validate the investigated PMCW-based RadCom system and synchronization strategy.
Discrete-Fresnel Domain Channel Estimation in OCDM-based Radar Systems
Jul 21, 2022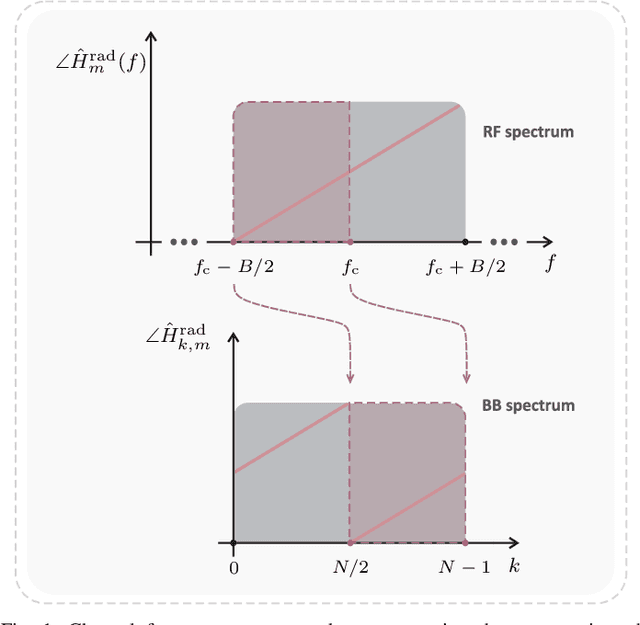
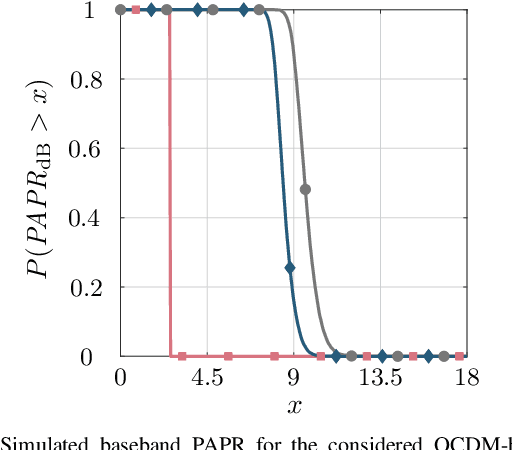
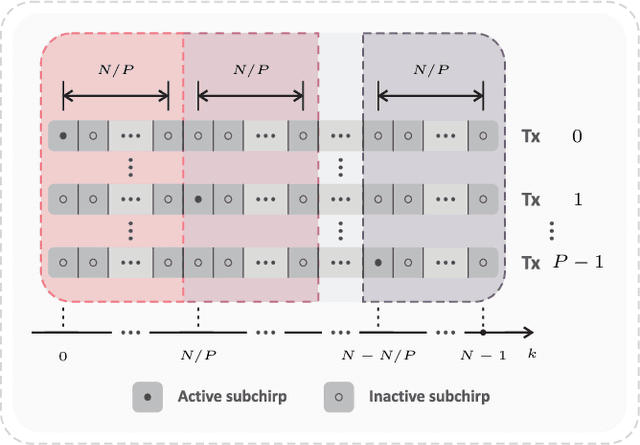
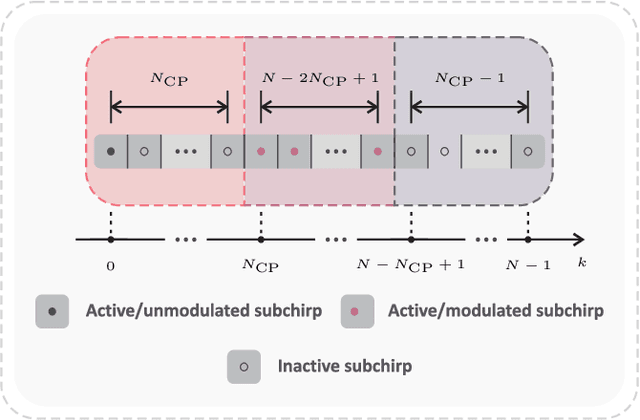
In recent years, orthogonal chirp-division multiplexing (OCDM) has been increasingly considered as an alternative multicarrier scheme, e.g., to orthogonal frequency-division multiplexing, in digital communication applications. Among reasons for thar are its demonstrated superior performance resulting from its robustness to impairments such as frequency selectivity of channels and intersymbol interference. Furthermore, the so-called unbiased channel estimation in the discrete-Fresnel domain has also been investigated for both communication and sensing systems, however without considering the effects of frequency shifts. This article investigates the suitability of the aforementioned discrete-Fresnel domain channel estimation in OCDM-based radar systems as an alternative to the correlation-based processing previously adopted, e.g., in the radar-communication (RadCom) literature, which yields high sidelobe level depending on the symbols modulated onto the orthogonal subchirps. In this context, a mathematical formulation for the aforementioned channel estimation approach is introduced. Additionally, extensions to multi-user/multiple-input multiple-output and RadCom operations are proposed. Finally, the performance of the proposed schemes is analyzed, and the presented discussion is supported by simulation and measurement results. In summary, all proposed OCDM-based schemes yield comparable radar sensing performance to their orthogonal frequency-division multiplexing counterpart, while achieving improved peak-to-average power ratio and, in the RadCom case, communication performance.
Quasi-Monostatic Antenna Displacement in Radar Target Simulation
Feb 07, 2022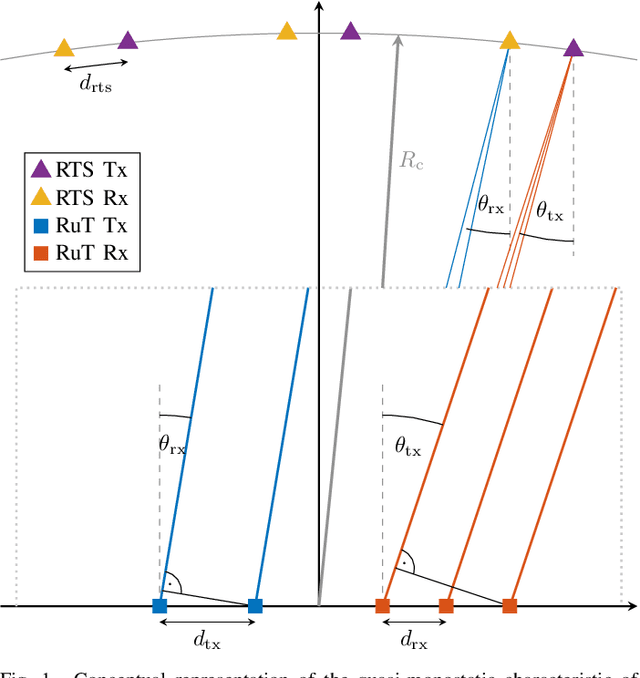
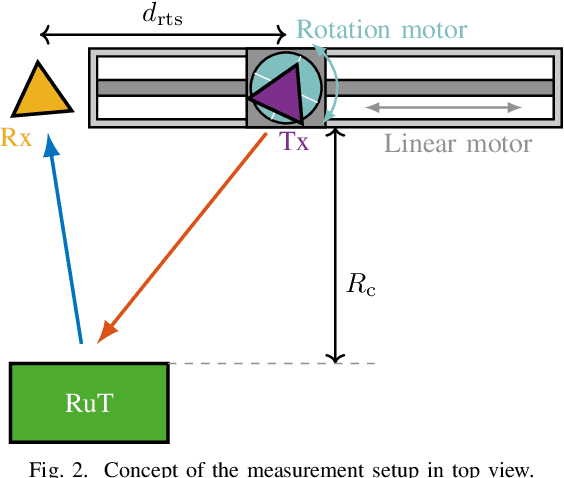
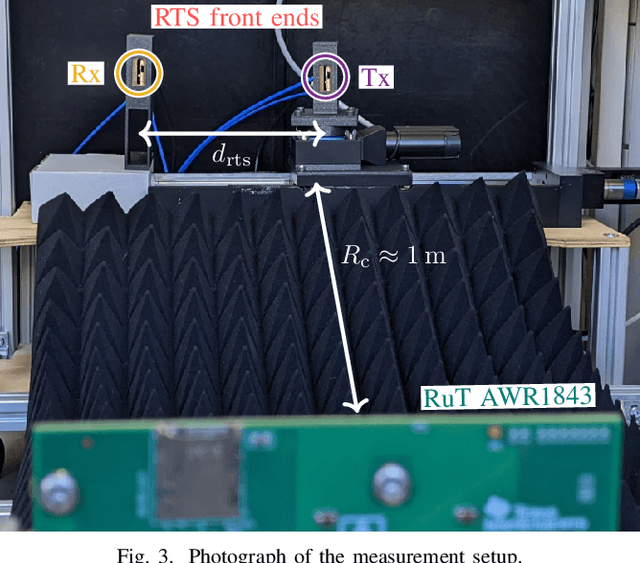
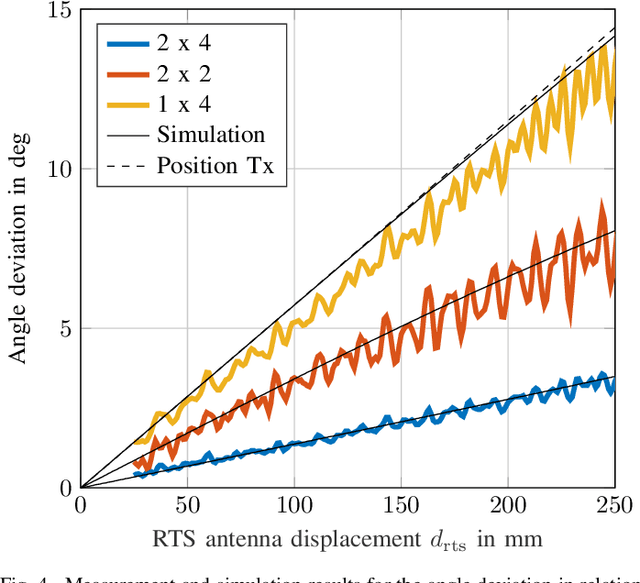
Radar target simulators (RTS) have recently drawn much attention in research and commercial development, as they are capable of performing over-the-air validation tests under laboratory conditions by generating virtual radar echoes that are perceived as targets by a radar under test (RuT). The estimated angle of arrival (AoA) of such a virtual target is determined by the physical position of the particular RTS channel that creates it, which must therefore be considered when planning the setup. A single channel employs two antennas, one for the reception and the other for the re-transmission of the incoming radar signal. The antennas are positioned close together, but still spatially separated, thus an RTS channel can be considered quasi-monostatic, which causes non-negligible inaccuracies in the angle simulation. In this paper, the authors examine the analytical implications of this systemic deficiency on the angle estimation, which provides support for the design and setup of angle-simulating RTS systems. The mathematical derivations developed are verified by measurement.
Two-Dimensional Arbitrary Angle of Arrival in Radar Target Simulation
Feb 07, 2022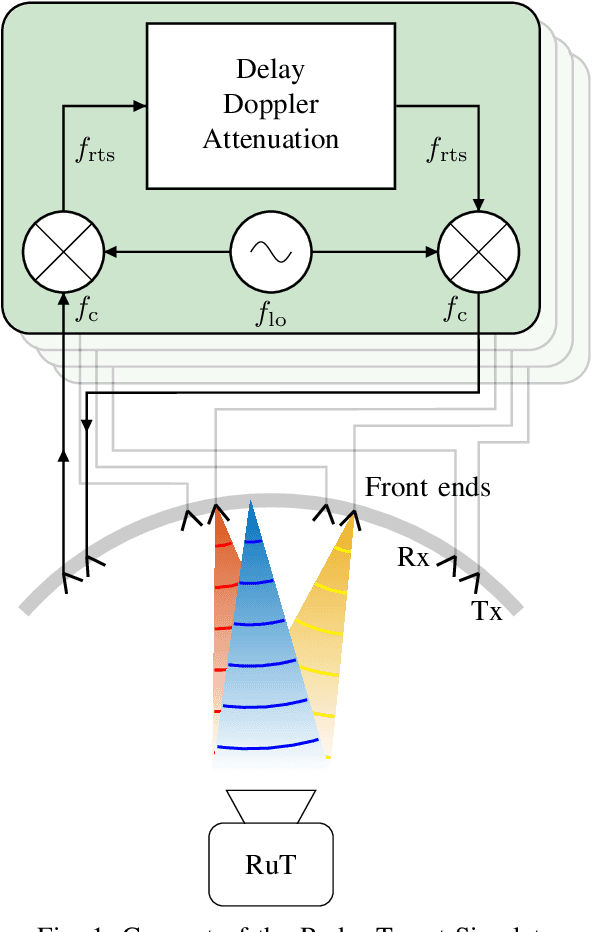
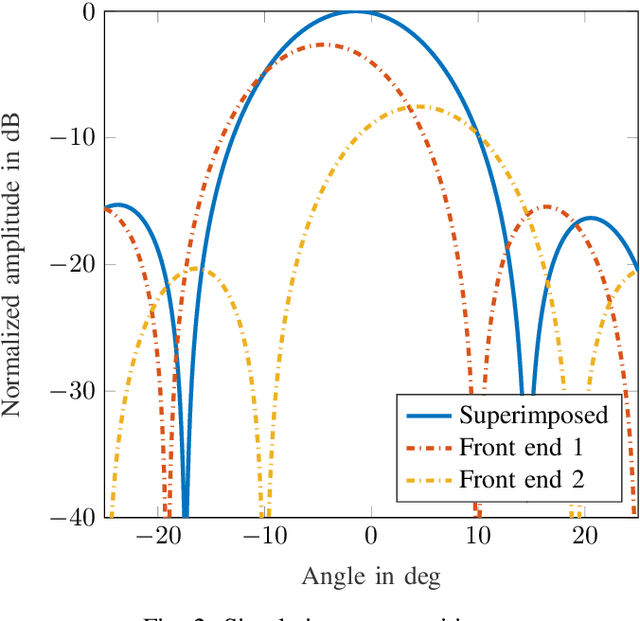
Automotive radar sensors play a key role in the current development of advanced driver assistance systems (ADAS). Their ability to detect objects even under adverse weather conditions makes them indispensable for environment-sensing tasks in autonomous vehicles. Since an operational failure presents a potential risk to human life, thorough and practical validation testing must be performed, requiring an integrative test solution. Radar target simulators (RTS) are capable of performing over-the-air validation tests by generating virtual radar echoes that are perceived as targets by the radar under test (RuT). Since the authenticity and credibility of these targets is based on the accuracy with which they are created, their simulated position must be arbitrarily adjustable. In this work, an existing approach to synthesize virtual radar targets at an arbitrary angle of arrival (AoA) is extended to cover both, the azimuth and elevation domain. The concept is based on the superposition of the returning signals from four neighboring RTS channels. A theoretical model describing the basic principle and its constraints is developed. In addition, a measurement campaign is conducted to verify the practical functionality of the proposed approach.
Arbitrary Angle of Arrival in Radar Target Simulation
Jul 06, 2021Automotive radar sensors play a key role in the current development of autonomous driving. Their ability to detect objects even under adverse conditions makes them indispensable for environment-sensing tasks in autonomous vehicles. The thorough and in-place validation of radar sensors demands for an integrative test system. Radar Target Simulators (RTS) are capable of performing over-the-air validation tests by creating artificial radar echos that are perceived as targets by the radar under test (RuT). Since the authenticity and credibility of these targets is based on the accuracy with which they are generated, their simulated position must be arbitrarily adjustable. In this paper, a new approach to synthesize virtual radar targets at an arbitrary angle of arrival is presented. The concept is based on the superposition of the returning signals of two adjacent RTS channels. A theoretical model describing the basic principle and its constraints is developed. A measurement campaign is conducted that verifies the practical functionality of the proposed scheme.