 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTwo-Dimensional Arbitrary Angle of Arrival in Radar Target Simulation
Paper and Code
Feb 07, 2022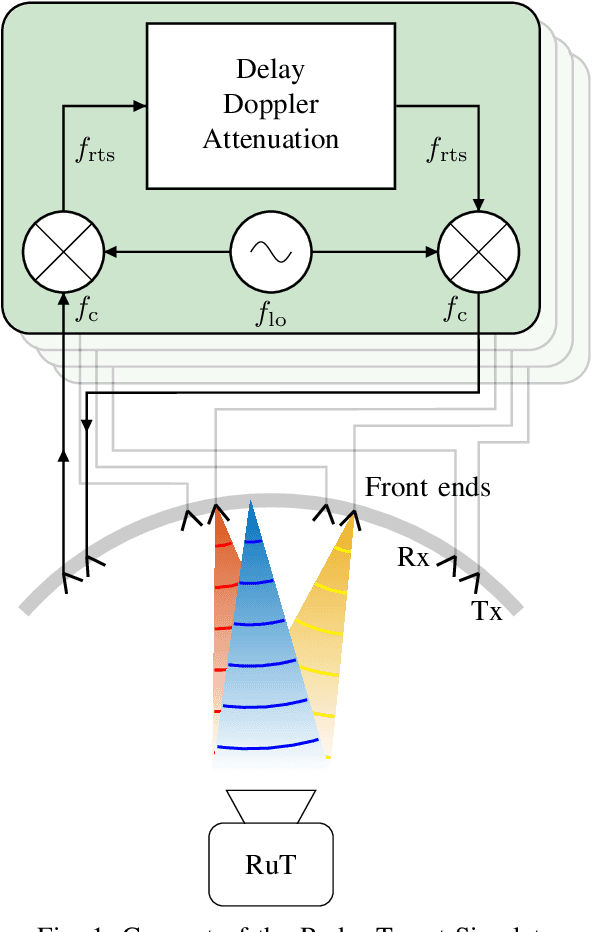
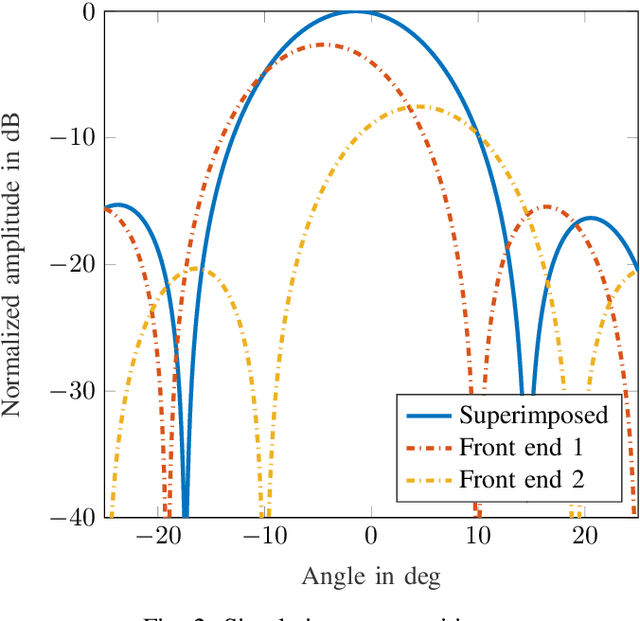
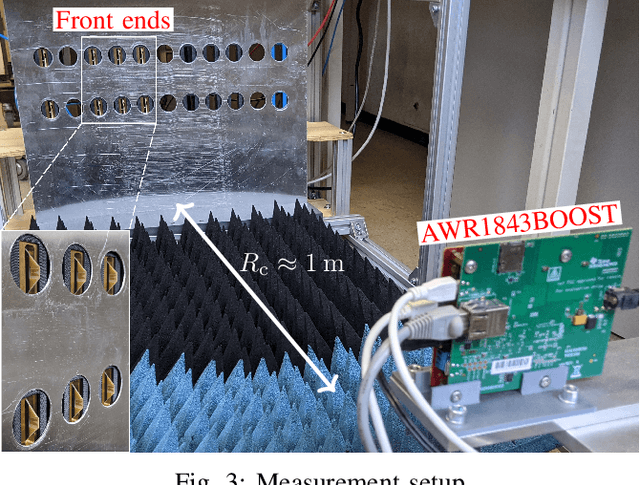
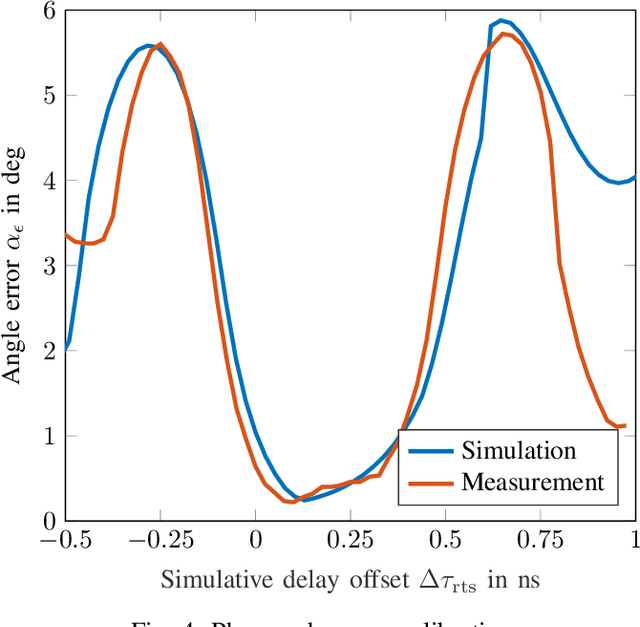
Automotive radar sensors play a key role in the current development of advanced driver assistance systems (ADAS). Their ability to detect objects even under adverse weather conditions makes them indispensable for environment-sensing tasks in autonomous vehicles. Since an operational failure presents a potential risk to human life, thorough and practical validation testing must be performed, requiring an integrative test solution. Radar target simulators (RTS) are capable of performing over-the-air validation tests by generating virtual radar echoes that are perceived as targets by the radar under test (RuT). Since the authenticity and credibility of these targets is based on the accuracy with which they are created, their simulated position must be arbitrarily adjustable. In this work, an existing approach to synthesize virtual radar targets at an arbitrary angle of arrival (AoA) is extended to cover both, the azimuth and elevation domain. The concept is based on the superposition of the returning signals from four neighboring RTS channels. A theoretical model describing the basic principle and its constraints is developed. In addition, a measurement campaign is conducted to verify the practical functionality of the proposed approach.