 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLow-Cost Teleoperation Extension for Mobile Manipulators
Mar 08, 2026Teleoperation of mobile bimanual manipulators requires simultaneous control of high-dimensional systems, often necessitating expensive specialized equipment. We present an open-source teleoperation framework that enables intuitive whole body control using readily available commodity hardware. Our system combines smartphone-based head tracking for camera control, leader arms for bilateral manipulation, and foot pedals for hands-free base navigation. Using a standard smartphone with IMU and display, we eliminate the need for costly VR helmets while maintaining immersive visual feedback. The modular architecture integrates seamlessly with the XLeRobot framework, but can be easily adapted to other types of mobile manipulators. We validate our approach through user studies that demonstrate improved task performance and reduced cognitive load compared to keyboard-based control.
Incremental Mapping with Measurement Synchronization & Compression
Feb 08, 2026Modern autonomous vehicles and robots utilize versatile sensors for localization and mapping. The fidelity of these maps is paramount, as an accurate environmental representation is a prerequisite for stable and precise localization. Factor graphs provide a powerful approach for sensor fusion, enabling the estimation of the maximum a posteriori solution. However, the discrete nature of graph-based representations, combined with asynchronous sensor measurements, complicates consistent state estimation. The design of an optimal factor graph topology remains an open challenge, especially in multi-sensor systems with asynchronous data. Conventional approaches rely on a rigid graph structure, which becomes inefficient with sensors of disparate rates. Although preintegration techniques can mitigate this for high-rate sensors, their applicability is limited. To address this problem, this work introduces a novel approach that incrementally constructs connected factor graphs, ensuring the incorporation of all available sensor data by choosing the optimal graph topology based on the external evaluation criteria. The proposed methodology facilitates graph compression, reducing the number of nodes (optimized variables) by ~30% on average while maintaining map quality at a level comparable to conventional approaches.
Adaptive MPC-based quadrupedal robot control under periodic disturbances
May 18, 2025Recent advancements in adaptive control for reference trajectory tracking enable quadrupedal robots to perform locomotion tasks under challenging conditions. There are methods enabling the estimation of the external disturbances in terms of forces and torques. However, a specific case of disturbances that are periodic was not explicitly tackled in application to quadrupeds. This work is devoted to the estimation of the periodic disturbances with a lightweight regressor using simplified robot dynamics and extracting the disturbance properties in terms of the magnitude and frequency. Experimental evidence suggests performance improvement over the baseline static disturbance compensation. All source files, including simulation setups, code, and calculation scripts, are available on GitHub at https://github.com/aidagroup/quad-periodic-mpc.
Quadrupedal Robot Skateboard Mounting via Reverse Curriculum Learning
May 10, 2025The aim of this work is to enable quadrupedal robots to mount skateboards using Reverse Curriculum Reinforcement Learning. Although prior work has demonstrated skateboarding for quadrupeds that are already positioned on the board, the initial mounting phase still poses a significant challenge. A goal-oriented methodology was adopted, beginning with the terminal phases of the task and progressively increasing the complexity of the problem definition to approximate the desired objective. The learning process was initiated with the skateboard rigidly fixed within the global coordinate frame and the robot positioned directly above it. Through gradual relaxation of these initial conditions, the learned policy demonstrated robustness to variations in skateboard position and orientation, ultimately exhibiting a successful transfer to scenarios involving a mobile skateboard. The code, trained models, and reproducible examples are available at the following link: https://github.com/dancher00/quadruped-skateboard-mounting
Optimizing energy consumption for legged robot by adapting equilibrium position and stiffness of a parallel torsion spring
Nov 27, 2024This paper is dedicated to the development of a novel adaptive torsion spring mechanism for optimizing energy consumption in legged robots. By adjusting the equilibrium position and stiffness of the spring, the system improves energy efficiency during cyclic movements, such as walking and jumping. The adaptive compliance mechanism, consisting of a torsion spring combined with a worm gear driven by a servo actuator, compensates for motion-induced torque and reduces motor load. Simulation results demonstrate a significant reduction in power consumption, highlighting the effectiveness of this approach in enhancing robotic locomotion.
HyperSurf: Quadruped Robot Leg Capable of Surface Recognition with GRU and Real-to-Sim Transferring
Jul 22, 2024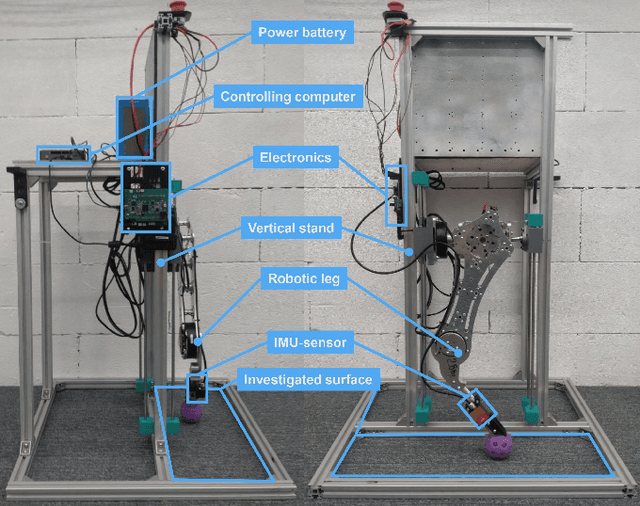
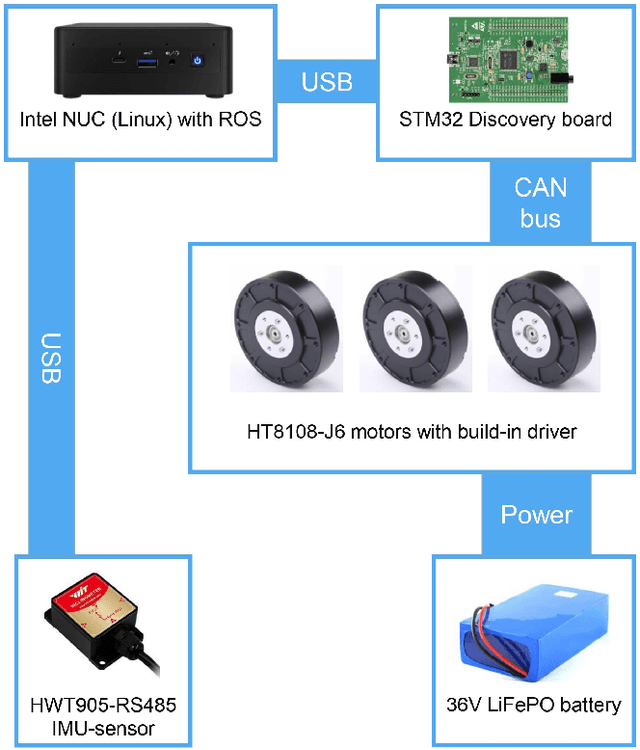
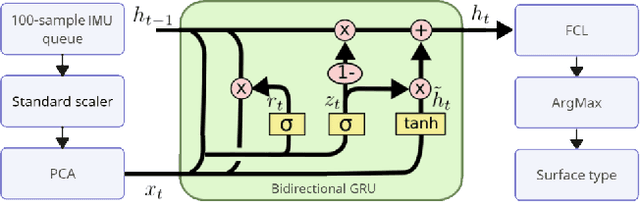
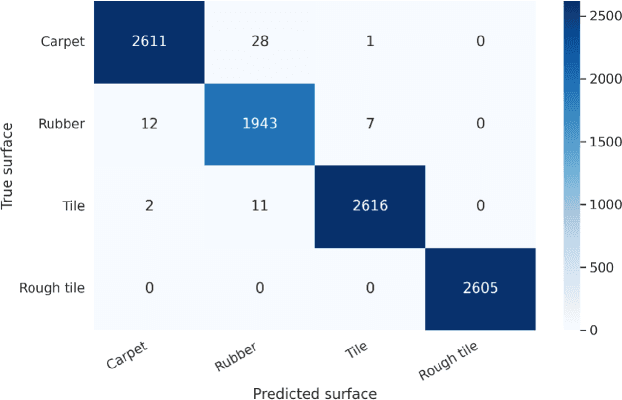
This paper introduces a system of data collection acceleration and real-to-sim transferring for surface recognition on a quadruped robot. The system features a mechanical single-leg setup capable of stepping on various easily interchangeable surfaces. Additionally, it incorporates a GRU-based Surface Recognition System, inspired by the system detailed in the Dog-Surf paper. This setup facilitates the expansion of dataset collection for model training, enabling data acquisition from hard-to-reach surfaces in laboratory conditions. Furthermore, it opens avenues for transferring surface properties from reality to simulation, thereby allowing the training of optimal gaits for legged robots in simulation environments using a pre-prepared library of digital twins of surfaces. Moreover, enhancements have been made to the GRU-based Surface Recognition System, allowing for the integration of data from both the quadruped robot and the single-leg setup. The dataset and code have been made publicly available.