 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAchieving Precise and Reliable Locomotion with Differentiable Simulation-Based System Identification
Aug 06, 2025Accurate system identification is crucial for reducing trajectory drift in bipedal locomotion, particularly in reinforcement learning and model-based control. In this paper, we present a novel control framework that integrates system identification into the reinforcement learning training loop using differentiable simulation. Unlike traditional approaches that rely on direct torque measurements, our method estimates system parameters using only trajectory data (positions, velocities) and control inputs. We leverage the differentiable simulator MuJoCo-XLA to optimize system parameters, ensuring that simulated robot behavior closely aligns with real-world motion. This framework enables scalable and flexible parameter optimization. Accurate system identification is crucial for reducing trajectory drift in bipedal locomotion, particularly in reinforcement learning and model-based control. In this paper, we present a novel control framework that integrates system identification into the reinforcement learning training loop using differentiable simulation. Unlike traditional approaches that rely on direct torque measurements, our method estimates system parameters using only trajectory data (positions, velocities) and control inputs. We leverage the differentiable simulator MuJoCo-XLA to optimize system parameters, ensuring that simulated robot behavior closely aligns with real-world motion. This framework enables scalable and flexible parameter optimization. It supports fundamental physical properties such as mass and inertia. Additionally, it handles complex system nonlinear behaviors, including advanced friction models, through neural network approximations. Experimental results show that our framework significantly improves trajectory following.
HyperSurf: Quadruped Robot Leg Capable of Surface Recognition with GRU and Real-to-Sim Transferring
Jul 22, 2024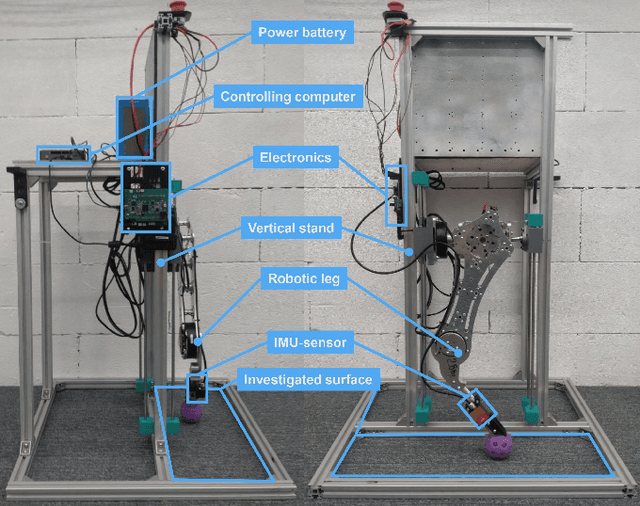
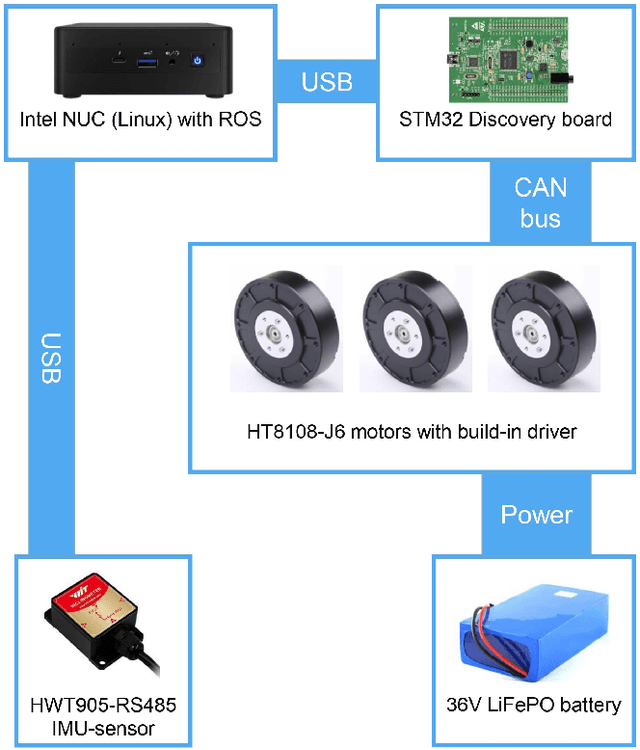
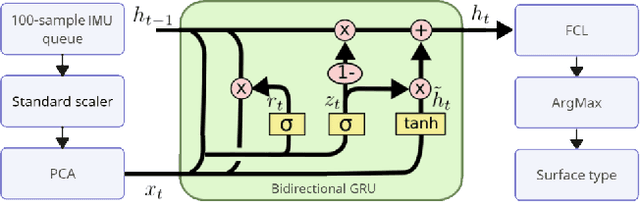
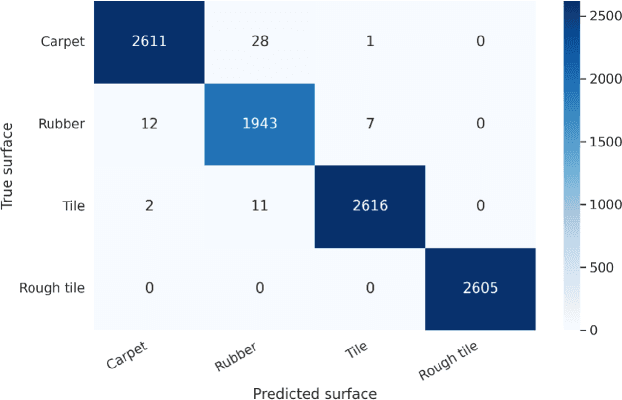
This paper introduces a system of data collection acceleration and real-to-sim transferring for surface recognition on a quadruped robot. The system features a mechanical single-leg setup capable of stepping on various easily interchangeable surfaces. Additionally, it incorporates a GRU-based Surface Recognition System, inspired by the system detailed in the Dog-Surf paper. This setup facilitates the expansion of dataset collection for model training, enabling data acquisition from hard-to-reach surfaces in laboratory conditions. Furthermore, it opens avenues for transferring surface properties from reality to simulation, thereby allowing the training of optimal gaits for legged robots in simulation environments using a pre-prepared library of digital twins of surfaces. Moreover, enhancements have been made to the GRU-based Surface Recognition System, allowing for the integration of data from both the quadruped robot and the single-leg setup. The dataset and code have been made publicly available.
Combining model-predictive control and predictive reinforcement learning for stable quadrupedal robot locomotion
Jul 15, 2023



Stable gait generation is a crucial problem for legged robot locomotion as this impacts other critical performance factors such as, e.g. mobility over an uneven terrain and power consumption. Gait generation stability results from the efficient control of the interaction between the legged robot's body and the environment where it moves. Here, we study how this can be achieved by a combination of model-predictive and predictive reinforcement learning controllers. Model-predictive control (MPC) is a well-established method that does not utilize any online learning (except for some adaptive variations) as it provides a convenient interface for state constraints management. Reinforcement learning (RL), in contrast, relies on adaptation based on pure experience. In its bare-bone variants, RL is not always suitable for robots due to their high complexity and expensive simulation/experimentation. In this work, we combine both control methods to address the quadrupedal robot stable gate generation problem. The hybrid approach that we develop and apply uses a cost roll-out algorithm with a tail cost in the form of a Q-function modeled by a neural network; this allows to alleviate the computational complexity, which grows exponentially with the prediction horizon in a purely MPC approach. We demonstrate that our RL gait controller achieves stable locomotion at short horizons, where a nominal MP controller fails. Further, our controller is capable of live operation, meaning that it does not require previous training. Our results suggest that the hybridization of MPC with RL, as presented here, is beneficial to achieve a good balance between online control capabilities and computational complexity.