 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyperSurf: Quadruped Robot Leg Capable of Surface Recognition with GRU and Real-to-Sim Transferring
Paper and Code
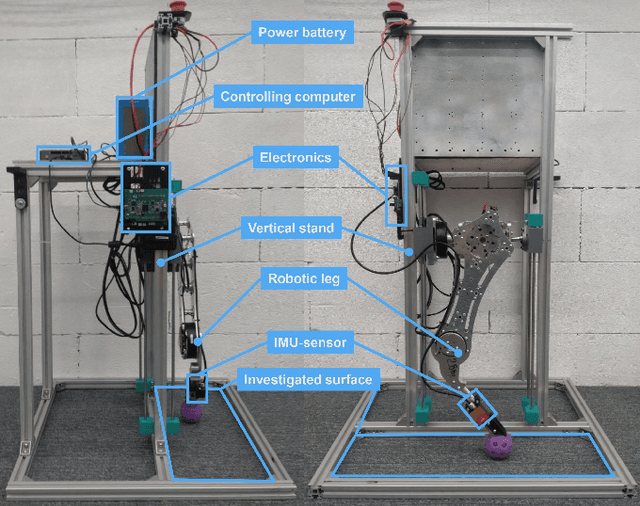
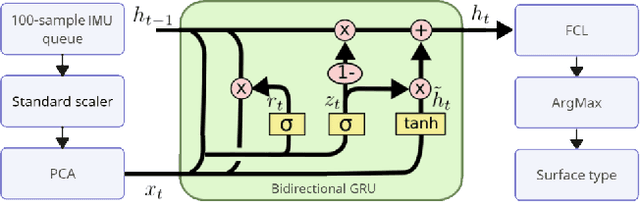
This paper introduces a system of data collection acceleration and real-to-sim transferring for surface recognition on a quadruped robot. The system features a mechanical single-leg setup capable of stepping on various easily interchangeable surfaces. Additionally, it incorporates a GRU-based Surface Recognition System, inspired by the system detailed in the Dog-Surf paper. This setup facilitates the expansion of dataset collection for model training, enabling data acquisition from hard-to-reach surfaces in laboratory conditions. Furthermore, it opens avenues for transferring surface properties from reality to simulation, thereby allowing the training of optimal gaits for legged robots in simulation environments using a pre-prepared library of digital twins of surfaces. Moreover, enhancements have been made to the GRU-based Surface Recognition System, allowing for the integration of data from both the quadruped robot and the single-leg setup. The dataset and code have been made publicly available.