 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuasi Real-Time Autonomous Satellite Detection and Orbit Estimation
Apr 13, 2023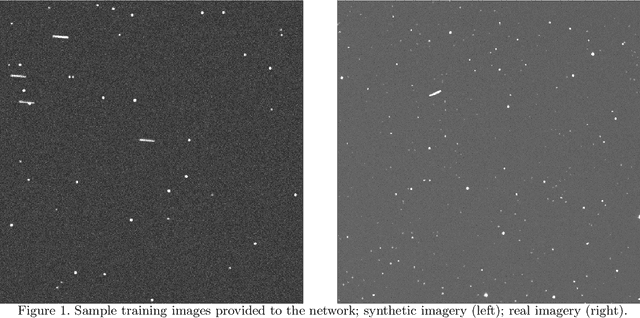
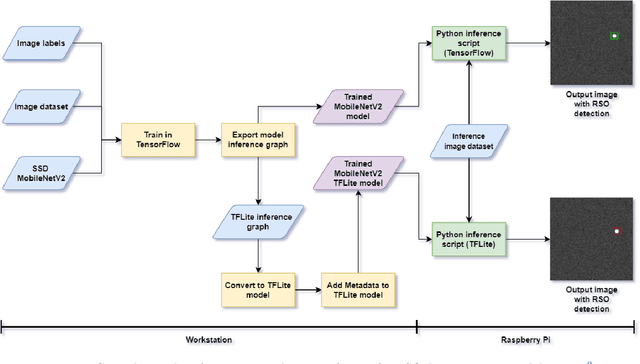
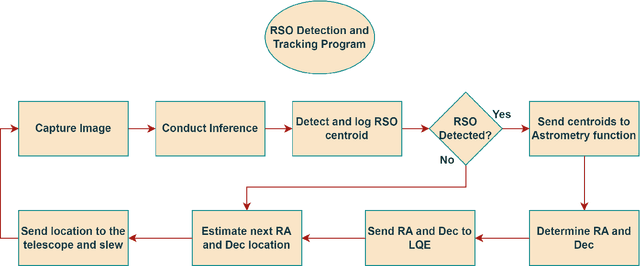
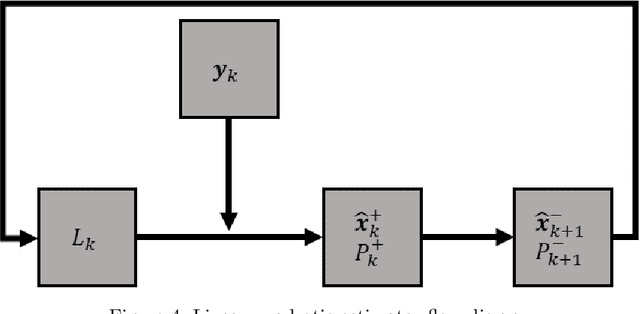
A method of near real-time detection and tracking of resident space objects (RSOs) using a convolutional neural network (CNN) and linear quadratic estimator (LQE) is proposed. Advances in machine learning architecture allow the use of low-power/cost embedded devices to perform complex classification tasks. In order to reduce the costs of tracking systems, a low-cost embedded device will be used to run a CNN detection model for RSOs in unresolved images captured by a gray-scale camera and small telescope. Detection results computed in near real-time are then passed to an LQE to compute tracking updates for the telescope mount, resulting in a fully autonomous method of optical RSO detection and tracking. Keywords: Space Domain Awareness, Neural Networks, Real-Time, Object Detection, Embedded Systems.
Initial Orbit Determination for the CR3BP using Particle Swarm Optimization
Jul 23, 2022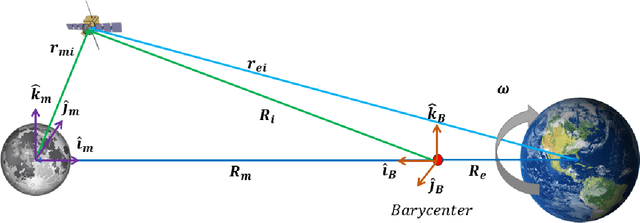
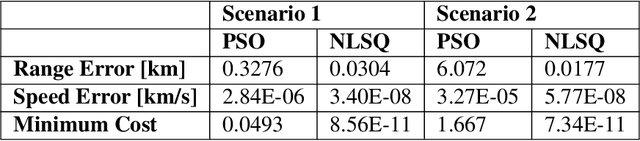
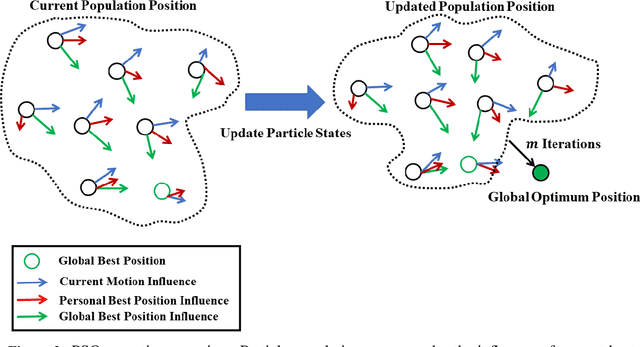
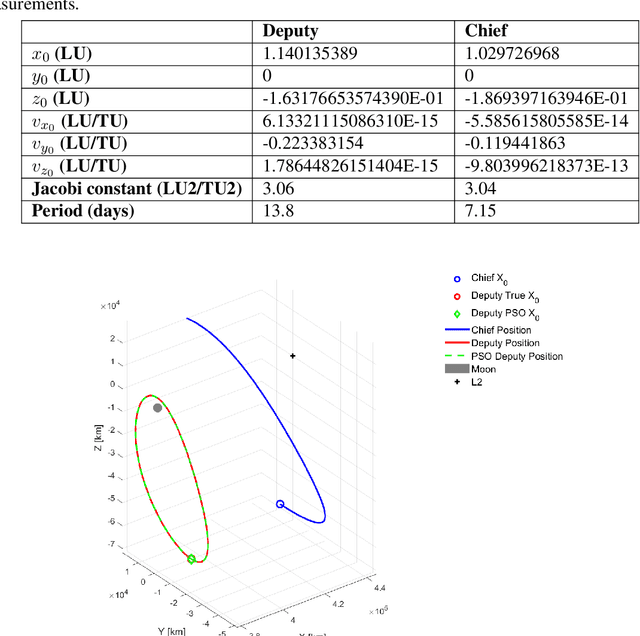
This work utilizes a particle swarm optimizer (PSO) for initial orbit determination for a chief and deputy scenario in the circular restricted three-body problem (CR3BP). The PSO is used to minimize the difference between actual and estimated observations and knowledge of the chief's position with known CR3BP dynamics to determine the deputy's initial state. Convergence is achieved through limiting particle starting positions to feasible positions based on the known chief position, and sensor constraints. Parallel and GPU processing methods are used to improve computation time and provide an accurate initial state estimate for a variety of cislunar orbit geometries.
RGB-D Robotic Pose Estimation For a Servicing Robotic Arm
Jul 23, 2022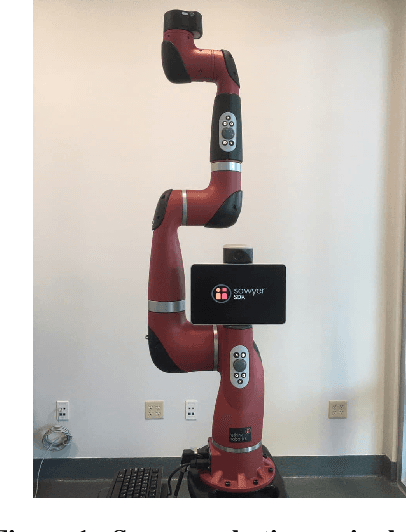

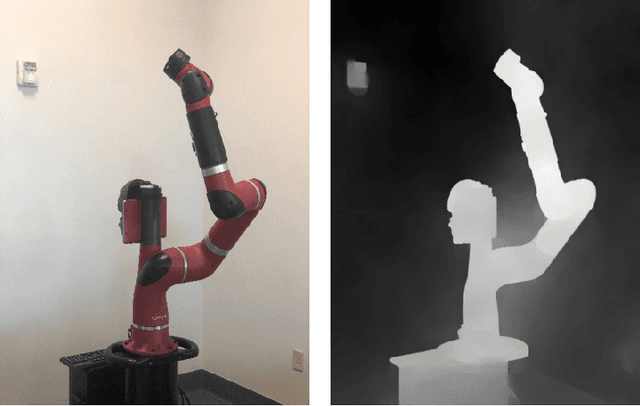
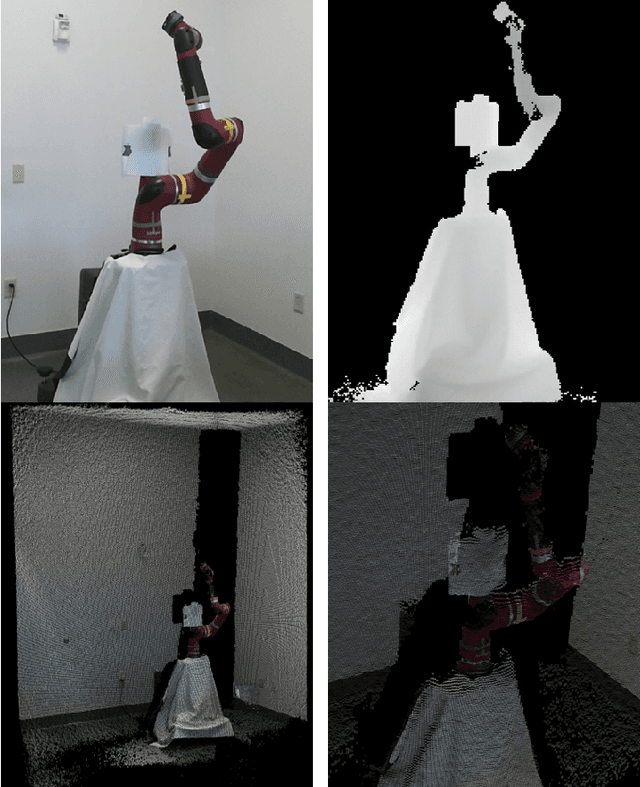
A large number of robotic and human-assisted missions to the Moon and Mars are forecast. NASA's efforts to learn about the geology and makeup of these celestial bodies rely heavily on the use of robotic arms. The safety and redundancy aspects will be crucial when humans will be working alongside the robotic explorers. Additionally, robotic arms are crucial to satellite servicing and planned orbit debris mitigation missions. The goal of this work is to create a custom Computer Vision (CV) based Artificial Neural Network (ANN) that would be able to rapidly identify the posture of a 7 Degree of Freedom (DoF) robotic arm from a single (RGB-D) image - just like humans can easily identify if an arm is pointing in some general direction. The Sawyer robotic arm is used for developing and training this intelligent algorithm. Since Sawyer's joint space spans 7 dimensions, it is an insurmountable task to cover the entire joint configuration space. In this work, orthogonal arrays are used, similar to the Taguchi method, to efficiently span the joint space with the minimal number of training images. This ``optimally'' generated database is used to train the custom ANN and its degree of accuracy is on average equal to twice the smallest joint displacement step used for database generation. A pre-trained ANN will be useful for estimating the postures of robotic manipulators used on space stations, spacecraft, and rovers as an auxiliary tool or for contingency plans.
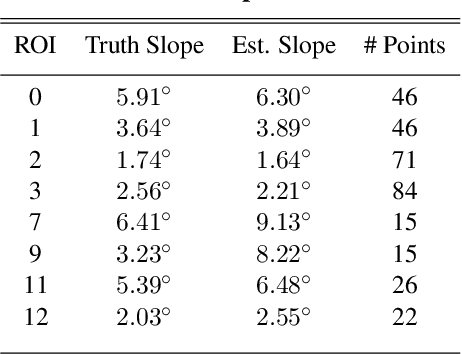
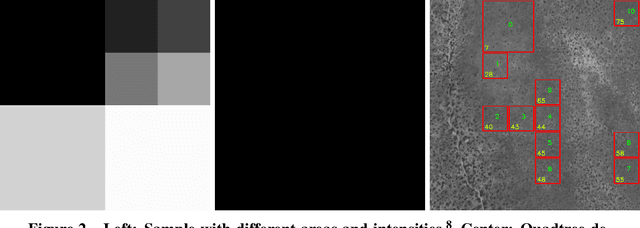
Detection and Initial Assessment of Lunar Landing Sites Using Neural Networks
Jul 23, 2022
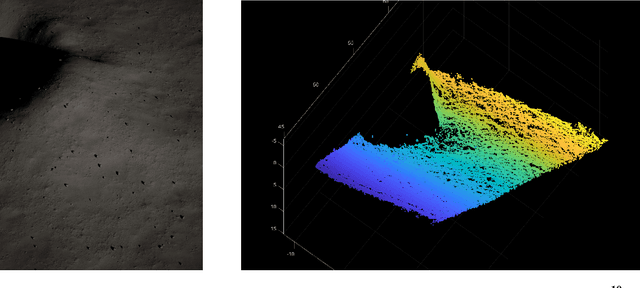
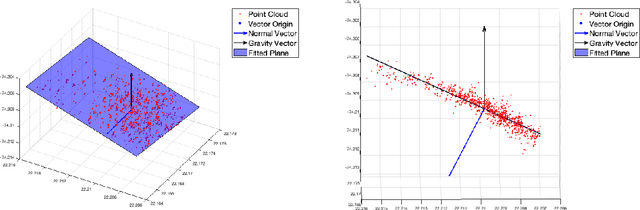
Robotic and human lunar landings are a focus of future NASA missions. Precision landing capabilities are vital to guarantee the success of the mission, and the safety of the lander and crew. During the approach to the surface there are multiple challenges associated with Hazard Relative Navigation to ensure safe landings. This paper will focus on a passive autonomous hazard detection and avoidance sub-system to generate an initial assessment of possible landing regions for the guidance system. The system uses a single camera and the MobileNetV2 neural network architecture to detect and discern between safe landing sites and hazards such as rocks, shadows, and craters. Then a monocular structure from motion will recreate the surface to provide slope and roughness analysis.
Satellite Detection in Unresolved Space Imagery for Space Domain Awareness Using Neural Networks
Jul 23, 2022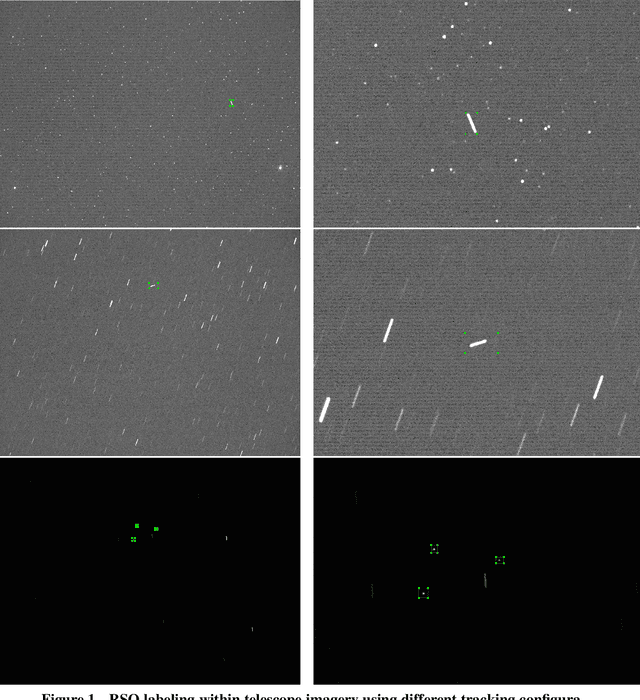

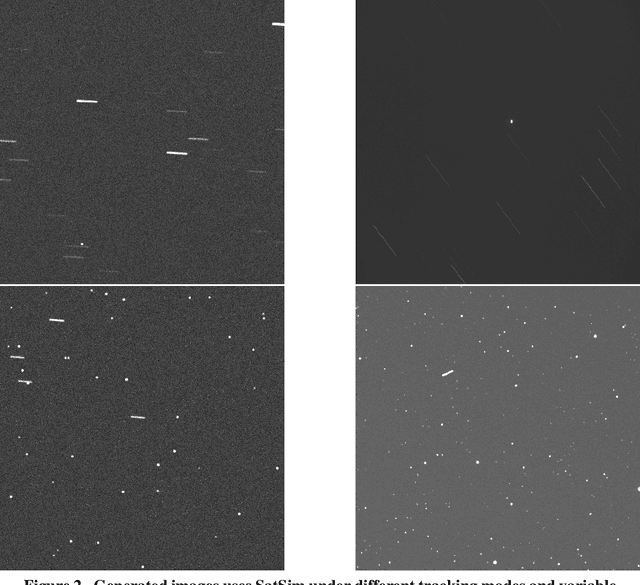
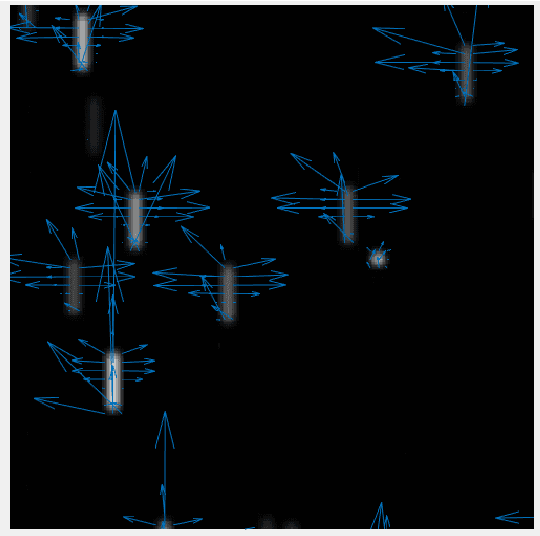
This work utilizes a MobileNetV2 Convolutional Neural Network (CNN) for fast, mobile detection of satellites, and rejection of stars, in cluttered unresolved space imagery. First, a custom database is created using imagery from a synthetic satellite image program and labeled with bounding boxes over satellites for "satellite-positive" images. The CNN is then trained on this database and the inference is validated by checking the accuracy of the model on an external dataset constructed of real telescope imagery. In doing so, the trained CNN provides a method of rapid satellite identification for subsequent utilization in ground-based orbit estimation.
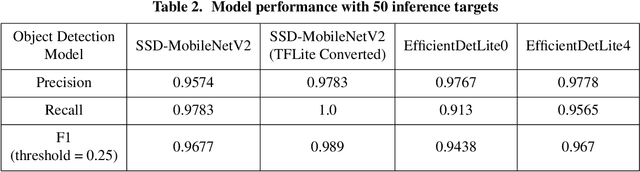
Autonomous Satellite Detection and Tracking using Optical Flow
Apr 14, 2022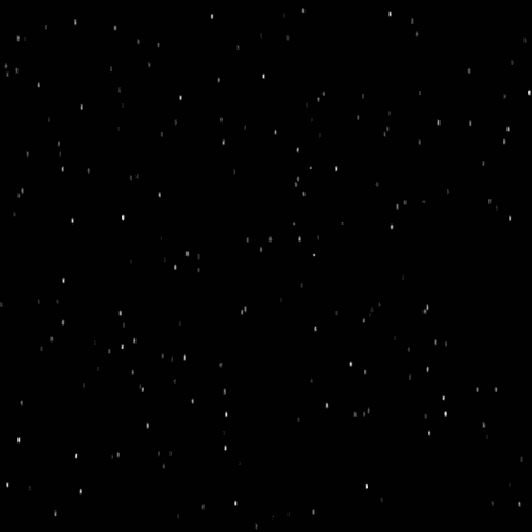
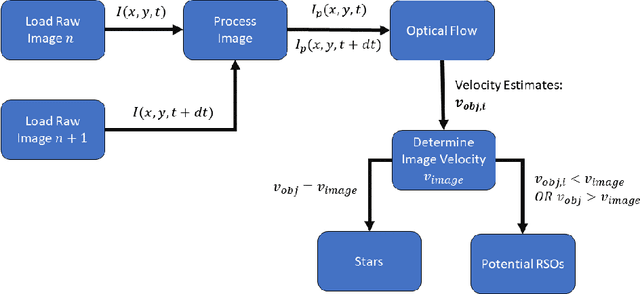
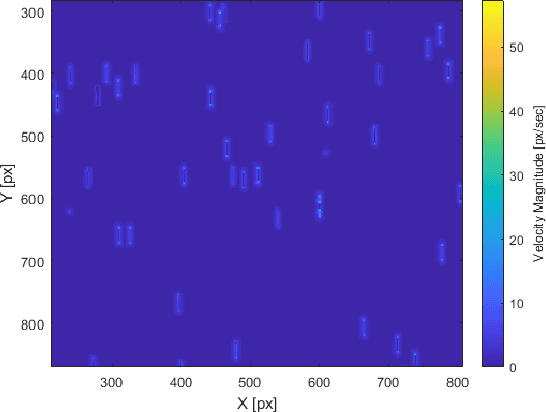
In this paper, an autonomous method of satellite detection and tracking in images is implemented using optical flow. Optical flow is used to estimate the image velocities of detected objects in a series of space images. Given that most objects in an image will be stars, the overall image velocity from star motion is used to estimate the image's frame-to-frame motion. Objects seen to be moving with velocity profiles distinct from the overall image velocity are then classified as potential resident space objects. The detection algorithm is exercised using both simulated star images and ground-based imagery of satellites. Finally, this algorithm will be tested and compared using a commercial and an open-source software approach to provide the reader with two different options based on their need.
NASA/GSFC's Flight Software Core Flight System Implementation For A Lunar Surface Imaging Mission
Apr 14, 2022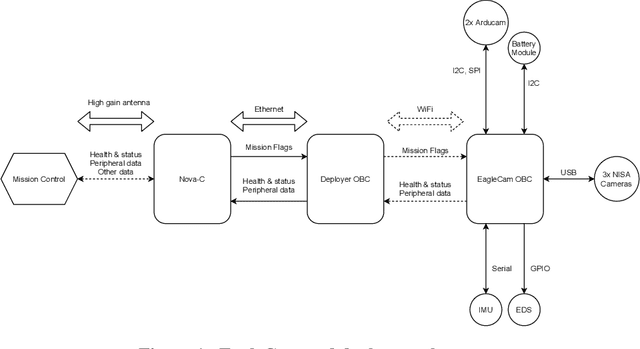
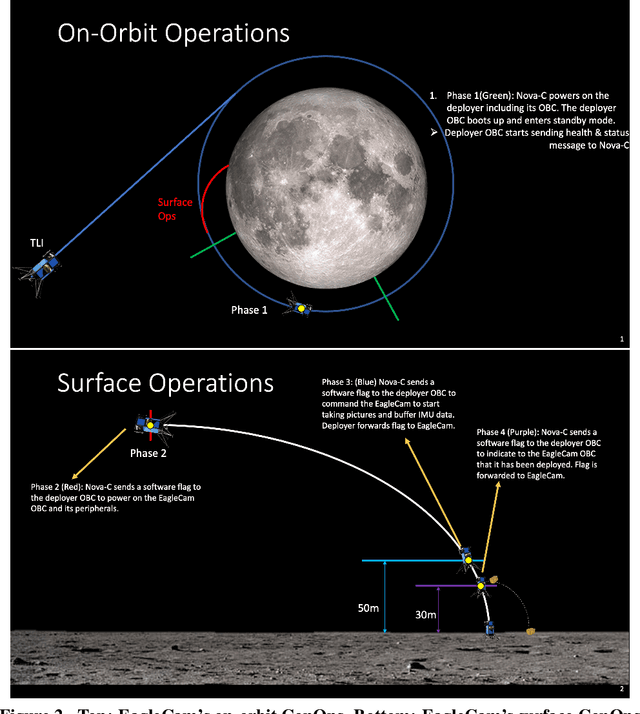
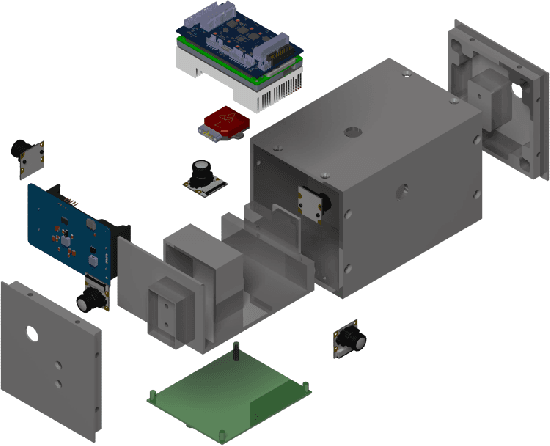
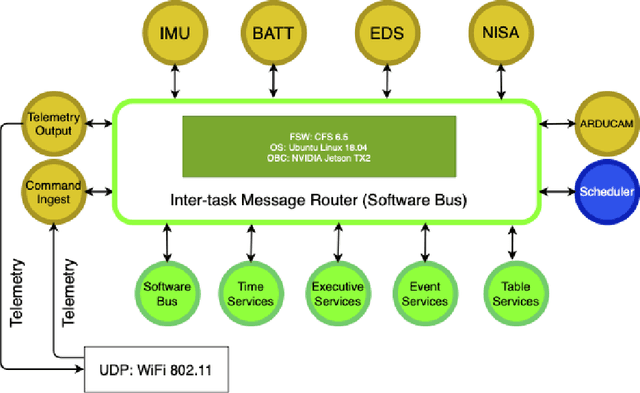
The interest in returning to the Moon for research and exploration has increased as new tipping point technologies are providing the possibility to do so. One of these initiatives is the Artemis program by NASA, which plans to return humans by 2024 to the lunar surface and study water deposits on the surface. This program will also serve as a practice run to plan the logistics of sending humans to explore Mars. To return humans safely to the Moon, multiple technological advances and diverse knowledge about the nature of the lunar surface are needed. This paper will discuss the design and implementation of the flight software of EagleCam, a CubeSat camera system based on the free open-source core Flight System (cFS) architecture developed by NASA's Goddard Space Flight Center. EagleCam is a payload transported to the Moon by the Commercial Lunar Payload Services Nova-C lander developed by Intuitive Machines. The camera system will capture the first third-person view of a spacecraft performing a Moon landing and collect other scientific data such as plume interaction with the surface. The complete system is composed of the CubeSat and the deployer that will eject it. This will be the first time WiFi protocol is used on the Moon to establish a local communication network.
Hazard Detection And Avoidance For The Nova-C Lander
Apr 01, 2022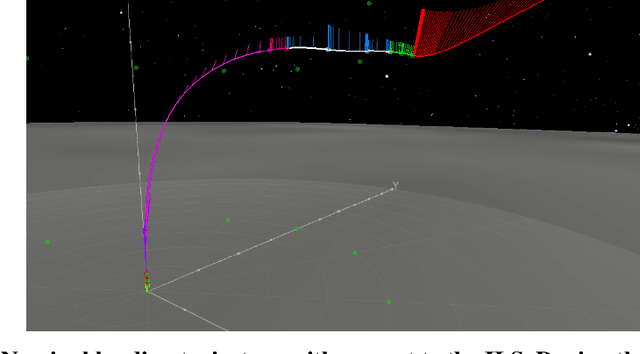
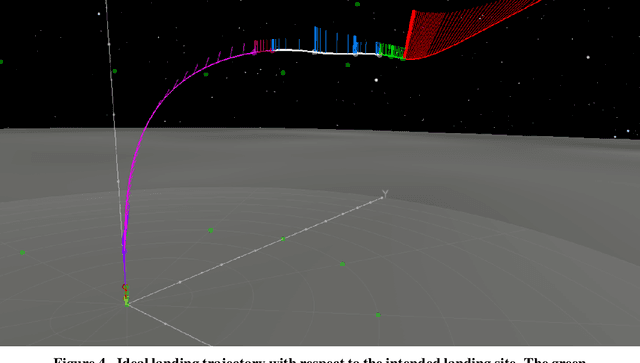
In early 2022, Intuitive Machines' NOVA-C Lander will touch down on the lunar surface becoming the first commercial endeavor to visit a celestial body. NOVA-C will deliver six payloads to the lunar surface with various scientific and engineering objectives, ushering in a new era of commercial space exploration and utilization. However, to safely accomplish the mission, the NOVA-C lander must ensure its landing site is free of hazards larger than 30 cm and the slope of local terrain at touchdown is less than 10 degrees off vertical. To accomplish this, NOVA-C utilizes Intuitive Machines' precision navigation system, coupled with machine vision algorithms for scene reduction and landing site characterization. A unique aspect to the NOVA-C approach is the real-time nature of the hazard detection and avoidance algorithms--which are performed 400 meters above and down range of the intended landing site and completed within 15 seconds. In this paper, we review the theoretical foundations for the hazard detection and avoidance algorithms, describe the practical challenges of implementation on the NOVA-C flight computer, and present test and analysis results.
Modeling of an On-Orbit Maintenance Robotic Arm Test-Bed
Mar 02, 2022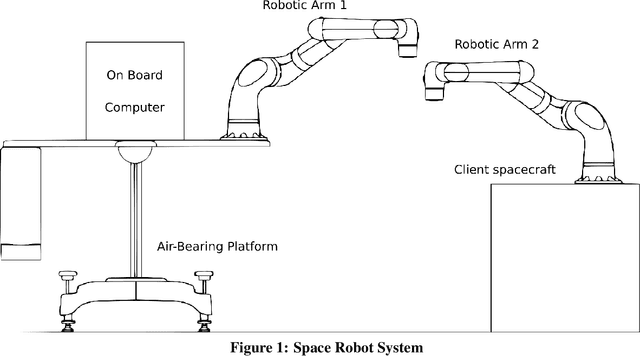
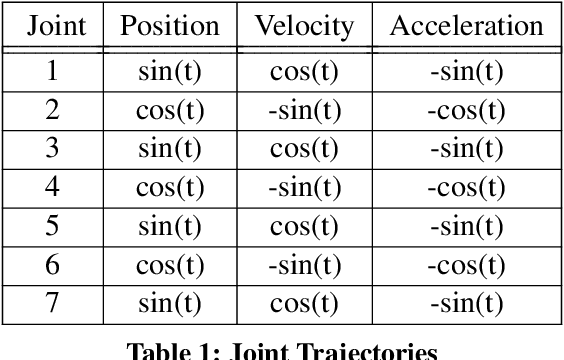
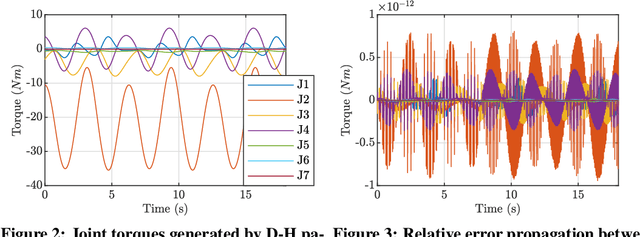

This paper focuses on the development of a ground-based test-bed to analyze the complexities of contact dynamics between multibody systems in space. The test-bed consists of an air-bearing platform equipped with a 7 degrees-of-freedom (one degree per revolute joint) robotic arm which acts as the servicing satellite. The dynamics of the manipulator on the platform is modeled as an aid for the analysis and design of stabilizing control algorithms suited for autonomous on-orbit servicing missions. The dynamics are represented analytically using a recursive Newton-Euler multibody method with D-H parameters derived from the physical properties of the arm and platform. In addition, Product of Exponential (PoE) method is also employed to serve as a comparison with the D-H parameters approach. Finally, an independent numerical simulation created with the SimScape modeling environment is also presented as a means of verifying the accuracy of the recursive model and the PoE approach. The results from both models and SimScape are then validated through comparison with internal measurement data taken from the robotic arm itself.