 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling of an On-Orbit Maintenance Robotic Arm Test-Bed
Mar 02, 2022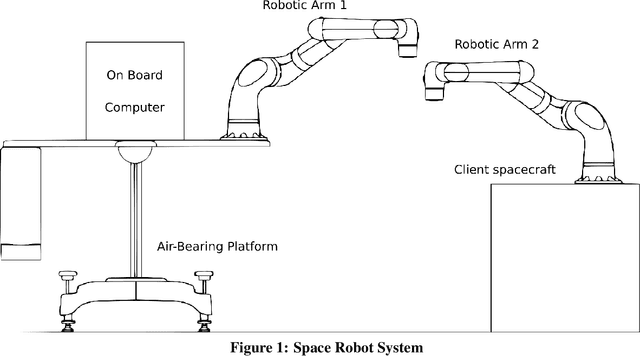

This paper focuses on the development of a ground-based test-bed to analyze the complexities of contact dynamics between multibody systems in space. The test-bed consists of an air-bearing platform equipped with a 7 degrees-of-freedom (one degree per revolute joint) robotic arm which acts as the servicing satellite. The dynamics of the manipulator on the platform is modeled as an aid for the analysis and design of stabilizing control algorithms suited for autonomous on-orbit servicing missions. The dynamics are represented analytically using a recursive Newton-Euler multibody method with D-H parameters derived from the physical properties of the arm and platform. In addition, Product of Exponential (PoE) method is also employed to serve as a comparison with the D-H parameters approach. Finally, an independent numerical simulation created with the SimScape modeling environment is also presented as a means of verifying the accuracy of the recursive model and the PoE approach. The results from both models and SimScape are then validated through comparison with internal measurement data taken from the robotic arm itself.