 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetection and Initial Assessment of Lunar Landing Sites Using Neural Networks
Paper and Code
Jul 23, 2022
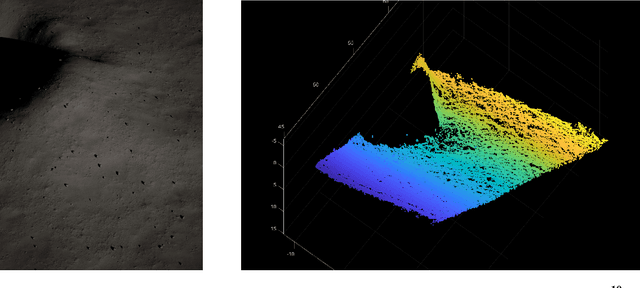
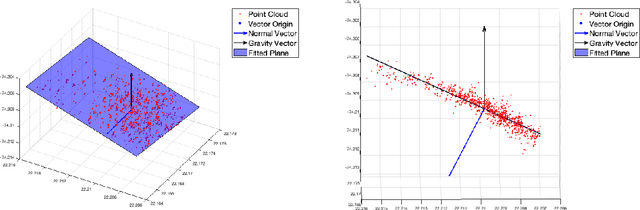
Robotic and human lunar landings are a focus of future NASA missions. Precision landing capabilities are vital to guarantee the success of the mission, and the safety of the lander and crew. During the approach to the surface there are multiple challenges associated with Hazard Relative Navigation to ensure safe landings. This paper will focus on a passive autonomous hazard detection and avoidance sub-system to generate an initial assessment of possible landing regions for the guidance system. The system uses a single camera and the MobileNetV2 neural network architecture to detect and discern between safe landing sites and hazards such as rocks, shadows, and craters. Then a monocular structure from motion will recreate the surface to provide slope and roughness analysis.