 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetection and Initial Assessment of Lunar Landing Sites Using Neural Networks
Jul 23, 2022
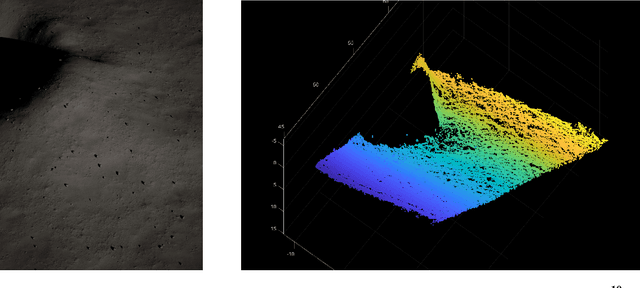
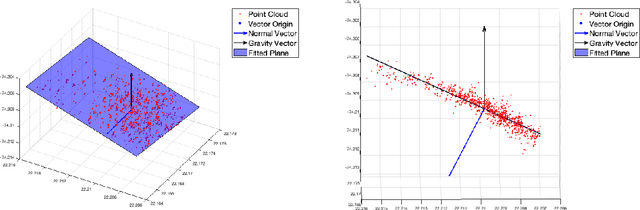
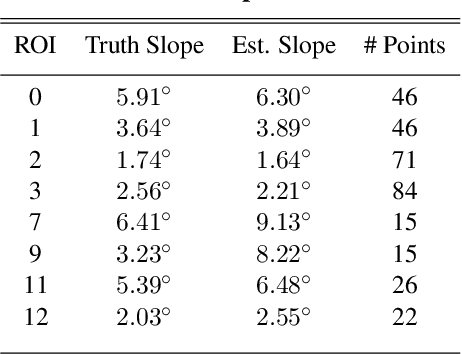
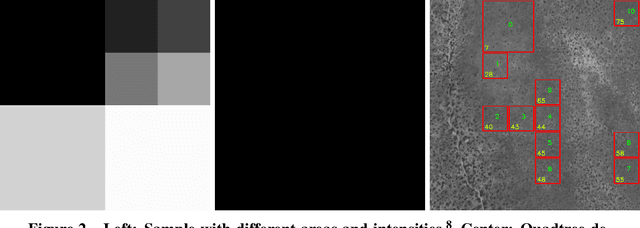
Robotic and human lunar landings are a focus of future NASA missions. Precision landing capabilities are vital to guarantee the success of the mission, and the safety of the lander and crew. During the approach to the surface there are multiple challenges associated with Hazard Relative Navigation to ensure safe landings. This paper will focus on a passive autonomous hazard detection and avoidance sub-system to generate an initial assessment of possible landing regions for the guidance system. The system uses a single camera and the MobileNetV2 neural network architecture to detect and discern between safe landing sites and hazards such as rocks, shadows, and craters. Then a monocular structure from motion will recreate the surface to provide slope and roughness analysis.
Hazard Detection And Avoidance For The Nova-C Lander
Apr 01, 2022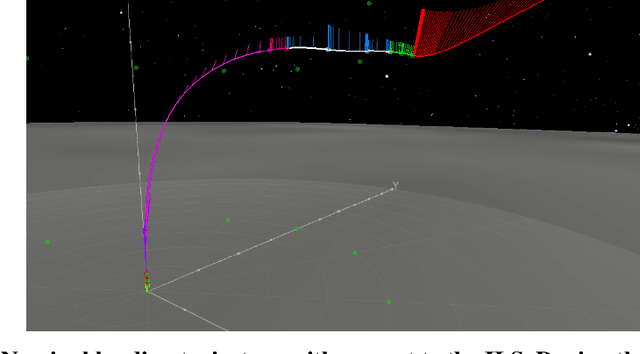
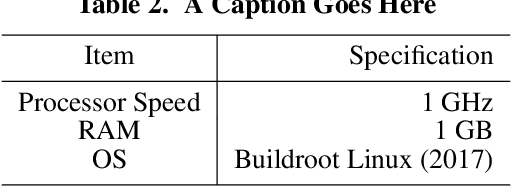
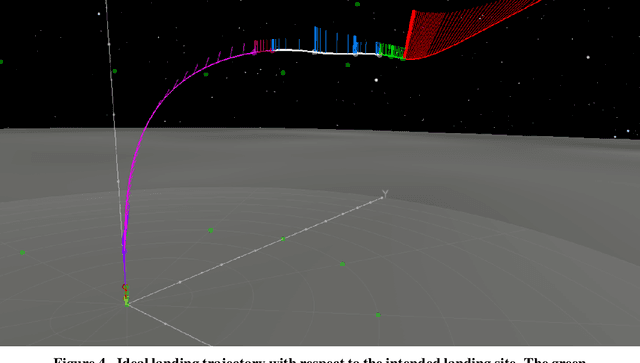
In early 2022, Intuitive Machines' NOVA-C Lander will touch down on the lunar surface becoming the first commercial endeavor to visit a celestial body. NOVA-C will deliver six payloads to the lunar surface with various scientific and engineering objectives, ushering in a new era of commercial space exploration and utilization. However, to safely accomplish the mission, the NOVA-C lander must ensure its landing site is free of hazards larger than 30 cm and the slope of local terrain at touchdown is less than 10 degrees off vertical. To accomplish this, NOVA-C utilizes Intuitive Machines' precision navigation system, coupled with machine vision algorithms for scene reduction and landing site characterization. A unique aspect to the NOVA-C approach is the real-time nature of the hazard detection and avoidance algorithms--which are performed 400 meters above and down range of the intended landing site and completed within 15 seconds. In this paper, we review the theoretical foundations for the hazard detection and avoidance algorithms, describe the practical challenges of implementation on the NOVA-C flight computer, and present test and analysis results.