 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSS-SFR: Synthetic Scenes Spatial Frequency Response on Virtual KITTI and Degraded Automotive Simulations for Object Detection
Jul 22, 2024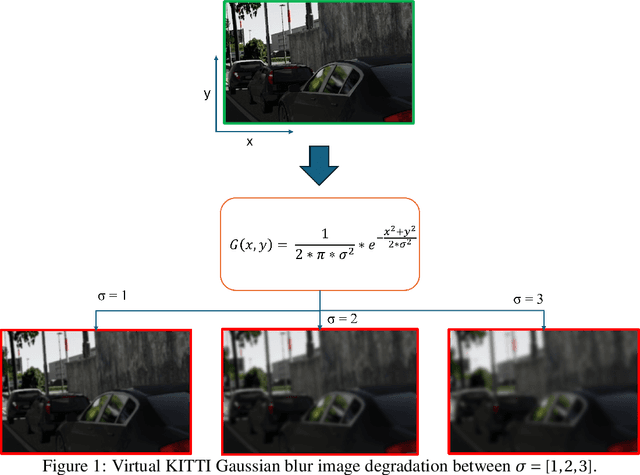

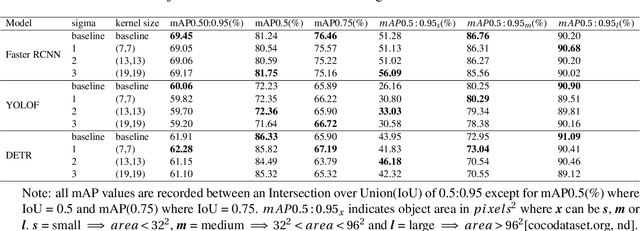
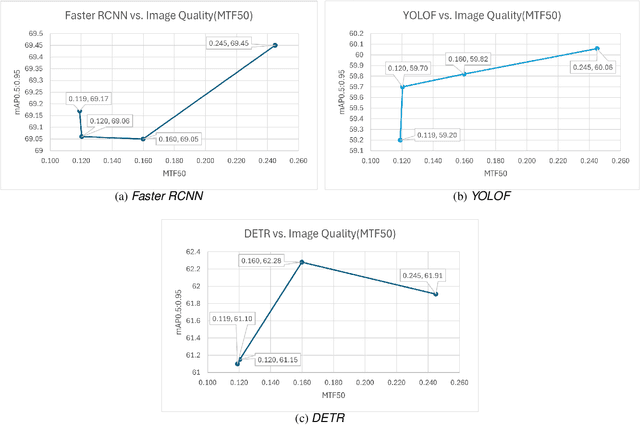
Automotive simulation can potentially compensate for a lack of training data in computer vision applications. However, there has been little to no image quality evaluation of automotive simulation and the impact of optical degradations on simulation is little explored. In this work, we investigate Virtual KITTI and the impact of applying variations of Gaussian blur on image sharpness. Furthermore, we consider object detection, a common computer vision application on three different state-of-the-art models, thus allowing us to characterize the relationship between object detection and sharpness. It was found that while image sharpness (MTF50) degrades from an average of 0.245cy/px to approximately 0.119cy/px; object detection performance stays largely robust within 0.58\%(Faster RCNN), 1.45\%(YOLOF) and 1.93\%(DETR) across all respective held-out test sets.
* 8 pages, 2 figures, 2 tables
Surround-View Fisheye Optics in Computer Vision and Simulation: Survey and Challenges
Feb 21, 2024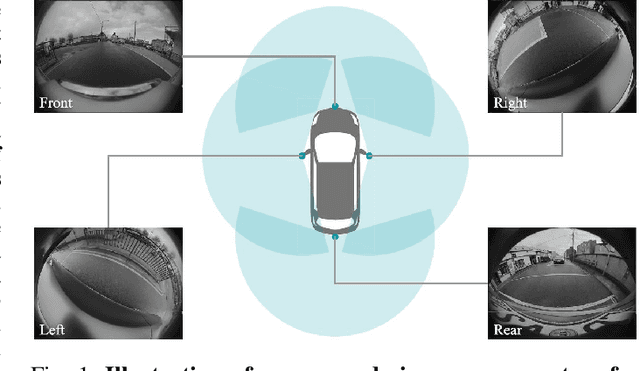
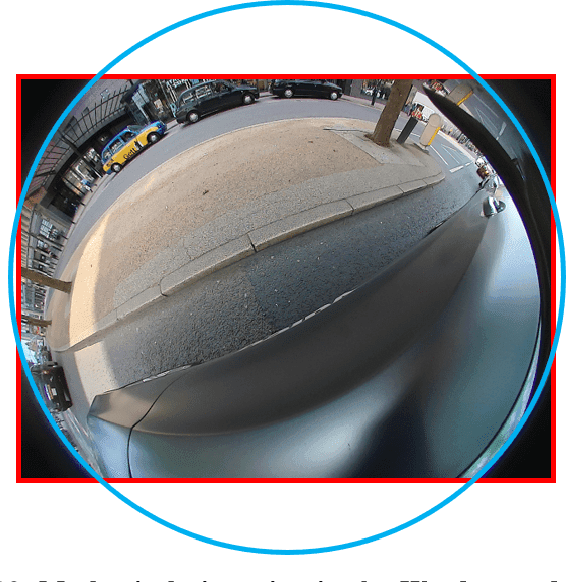

In this paper, we provide a survey on automotive surround-view fisheye optics, with an emphasis on the impact of optical artifacts on computer vision tasks in autonomous driving and ADAS. The automotive industry has advanced in applying state-of-the-art computer vision to enhance road safety and provide automated driving functionality. When using camera systems on vehicles, there is a particular need for a wide field of view to capture the entire vehicle's surroundings, in areas such as low-speed maneuvering, automated parking, and cocoon sensing. However, one crucial challenge in surround-view cameras is the strong optical aberrations of the fisheye camera, which is an area that has received little attention in the literature. Additionally, a comprehensive dataset is needed for testing safety-critical scenarios in vehicle automation. The industry has turned to simulation as a cost-effective strategy for creating synthetic datasets with surround-view camera imagery. We examine different simulation methods (such as model-driven and data-driven simulations) and discuss the simulators' ability (or lack thereof) to model real-world optical performance. Overall, this paper highlights the optical aberrations in automotive fisheye datasets, and the limitations of optical reality in simulated fisheye datasets, with a focus on computer vision in surround-view optical systems.
Measuring Natural Scenes SFR of Automotive Fisheye Cameras
Jan 10, 2024The Modulation Transfer Function (MTF) is an important image quality metric typically used in the automotive domain. However, despite the fact that optical quality has an impact on the performance of computer vision in vehicle automation, for many public datasets, this metric is unknown. Additionally, wide field-of-view (FOV) cameras have become increasingly popular, particularly for low-speed vehicle automation applications. To investigate image quality in datasets, this paper proposes an adaptation of the Natural Scenes Spatial Frequency Response (NS-SFR) algorithm to suit cameras with a wide field-of-view.