 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating the Impact of Weather-Induced Sensor Occlusion on BEVFusion for 3D Object Detection
Nov 06, 2025Accurate 3D object detection is essential for automated vehicles to navigate safely in complex real-world environments. Bird's Eye View (BEV) representations, which project multi-sensor data into a top-down spatial format, have emerged as a powerful approach for robust perception. Although BEV-based fusion architectures have demonstrated strong performance through multimodal integration, the effects of sensor occlusions, caused by environmental conditions such as fog, haze, or physical obstructions, on 3D detection accuracy remain underexplored. In this work, we investigate the impact of occlusions on both camera and Light Detection and Ranging (LiDAR) outputs using the BEVFusion architecture, evaluated on the nuScenes dataset. Detection performance is measured using mean Average Precision (mAP) and the nuScenes Detection Score (NDS). Our results show that moderate camera occlusions lead to a 41.3% drop in mAP (from 35.6% to 20.9%) when detection is based only on the camera. On the other hand, LiDAR sharply drops in performance only under heavy occlusion, with mAP falling by 47.3% (from 64.7% to 34.1%), with a severe impact on long-range detection. In fused settings, the effect depends on which sensor is occluded: occluding the camera leads to a minor 4.1% drop (from 68.5% to 65.7%), while occluding LiDAR results in a larger 26.8% drop (to 50.1%), revealing the model's stronger reliance on LiDAR for the task of 3D object detection. Our results highlight the need for future research into occlusion-aware evaluation methods and improved sensor fusion techniques that can maintain detection accuracy in the presence of partial sensor failure or degradation due to adverse environmental conditions.
Surround-View Fisheye Optics in Computer Vision and Simulation: Survey and Challenges
Feb 21, 2024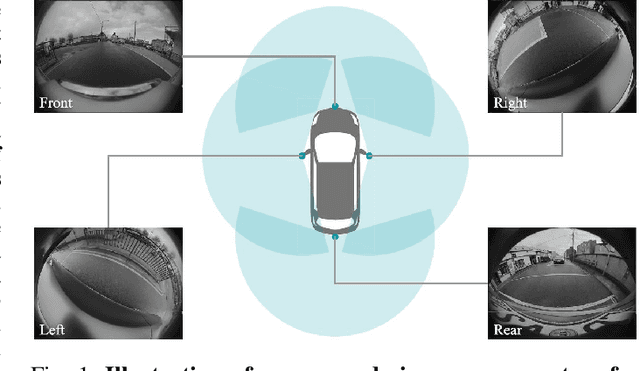

In this paper, we provide a survey on automotive surround-view fisheye optics, with an emphasis on the impact of optical artifacts on computer vision tasks in autonomous driving and ADAS. The automotive industry has advanced in applying state-of-the-art computer vision to enhance road safety and provide automated driving functionality. When using camera systems on vehicles, there is a particular need for a wide field of view to capture the entire vehicle's surroundings, in areas such as low-speed maneuvering, automated parking, and cocoon sensing. However, one crucial challenge in surround-view cameras is the strong optical aberrations of the fisheye camera, which is an area that has received little attention in the literature. Additionally, a comprehensive dataset is needed for testing safety-critical scenarios in vehicle automation. The industry has turned to simulation as a cost-effective strategy for creating synthetic datasets with surround-view camera imagery. We examine different simulation methods (such as model-driven and data-driven simulations) and discuss the simulators' ability (or lack thereof) to model real-world optical performance. Overall, this paper highlights the optical aberrations in automotive fisheye datasets, and the limitations of optical reality in simulated fisheye datasets, with a focus on computer vision in surround-view optical systems.
Measuring Natural Scenes SFR of Automotive Fisheye Cameras
Jan 10, 2024


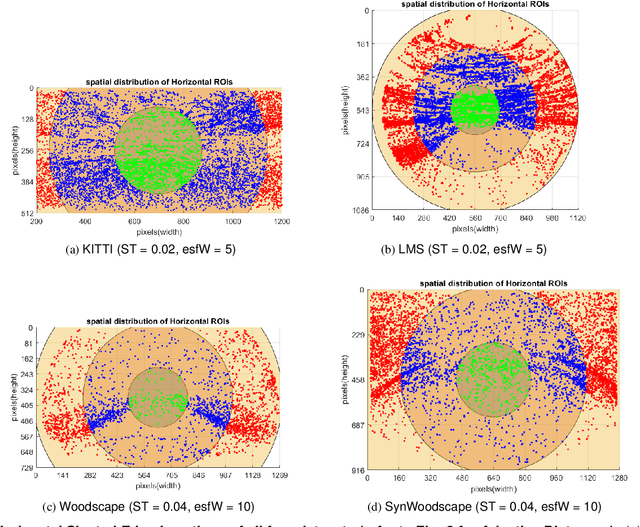
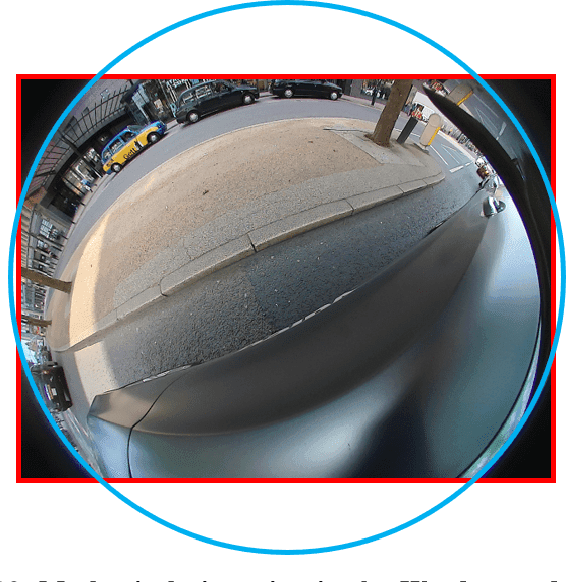
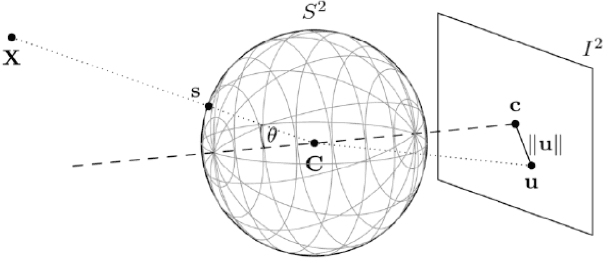
The Modulation Transfer Function (MTF) is an important image quality metric typically used in the automotive domain. However, despite the fact that optical quality has an impact on the performance of computer vision in vehicle automation, for many public datasets, this metric is unknown. Additionally, wide field-of-view (FOV) cameras have become increasingly popular, particularly for low-speed vehicle automation applications. To investigate image quality in datasets, this paper proposes an adaptation of the Natural Scenes Spatial Frequency Response (NS-SFR) algorithm to suit cameras with a wide field-of-view.