 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurround-View Fisheye Optics in Computer Vision and Simulation: Survey and Challenges
Paper and Code
Feb 21, 2024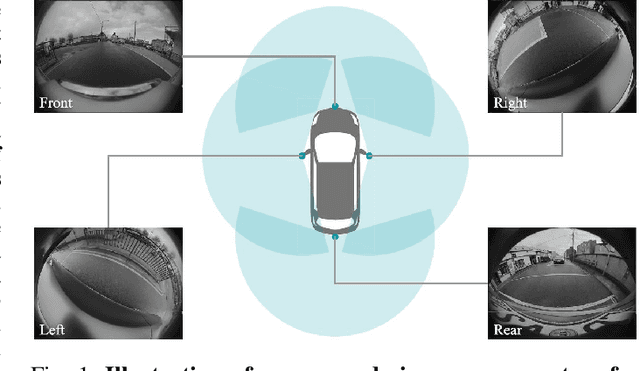
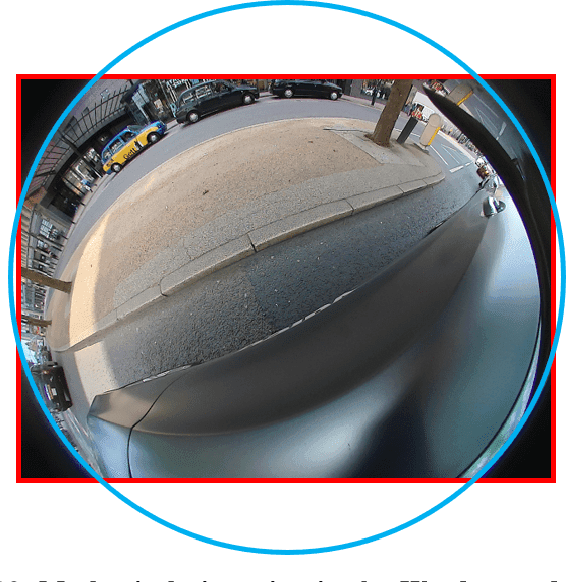

In this paper, we provide a survey on automotive surround-view fisheye optics, with an emphasis on the impact of optical artifacts on computer vision tasks in autonomous driving and ADAS. The automotive industry has advanced in applying state-of-the-art computer vision to enhance road safety and provide automated driving functionality. When using camera systems on vehicles, there is a particular need for a wide field of view to capture the entire vehicle's surroundings, in areas such as low-speed maneuvering, automated parking, and cocoon sensing. However, one crucial challenge in surround-view cameras is the strong optical aberrations of the fisheye camera, which is an area that has received little attention in the literature. Additionally, a comprehensive dataset is needed for testing safety-critical scenarios in vehicle automation. The industry has turned to simulation as a cost-effective strategy for creating synthetic datasets with surround-view camera imagery. We examine different simulation methods (such as model-driven and data-driven simulations) and discuss the simulators' ability (or lack thereof) to model real-world optical performance. Overall, this paper highlights the optical aberrations in automotive fisheye datasets, and the limitations of optical reality in simulated fisheye datasets, with a focus on computer vision in surround-view optical systems.