 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLow Dimensional State Representation Learning with Reward-shaped Priors
Jul 29, 2020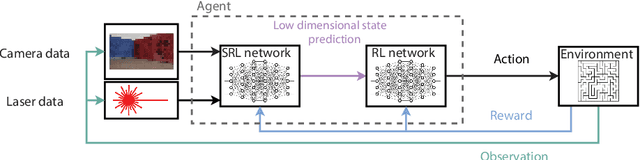

Reinforcement Learning has been able to solve many complicated robotics tasks without any need for feature engineering in an end-to-end fashion. However, learning the optimal policy directly from the sensory inputs, i.e the observations, often requires processing and storage of a huge amount of data. In the context of robotics, the cost of data from real robotics hardware is usually very high, thus solutions that achieve high sample-efficiency are needed. We propose a method that aims at learning a mapping from the observations into a lower-dimensional state space. This mapping is learned with unsupervised learning using loss functions shaped to incorporate prior knowledge of the environment and the task. Using the samples from the state space, the optimal policy is quickly and efficiently learned. We test the method on several mobile robot navigation tasks in a simulation environment and also on a real robot.
Comparison of Different Methods for Tissue Segmentation in Histopathological Whole-Slide Images
Apr 03, 2017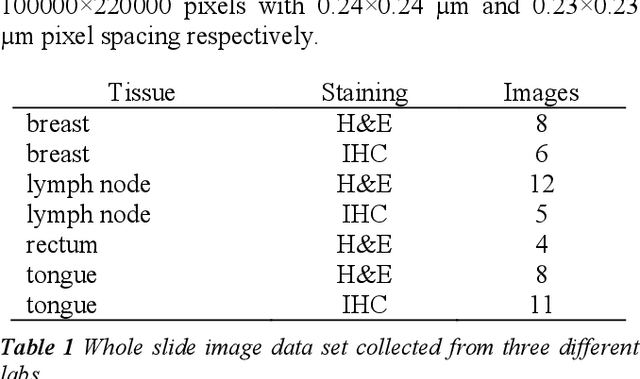
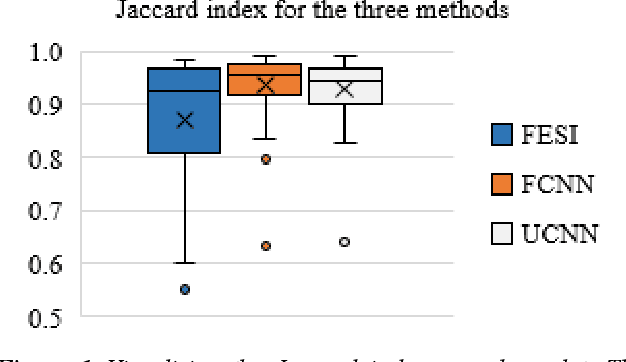

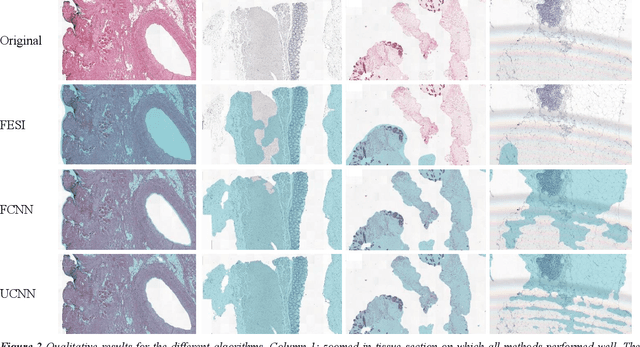
Tissue segmentation is an important pre-requisite for efficient and accurate diagnostics in digital pathology. However, it is well known that whole-slide scanners can fail in detecting all tissue regions, for example due to the tissue type, or due to weak staining because their tissue detection algorithms are not robust enough. In this paper, we introduce two different convolutional neural network architectures for whole slide image segmentation to accurately identify the tissue sections. We also compare the algorithms to a published traditional method. We collected 54 whole slide images with differing stains and tissue types from three laboratories to validate our algorithms. We show that while the two methods do not differ significantly they outperform their traditional counterpart (Jaccard index of 0.937 and 0.929 vs. 0.870, p < 0.01).