 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint Optimization of Trajectory Control, Resource Allocation, and Task Offloading for Multi-UAV-Assisted IoV
May 06, 2026This paper investigates a multi-Unmanned Aerial Vehicle (UAV) joint base station-assisted Internet of Vehicles (IoV) task offloading system in dense urban environments. To minimize system delay and energy consumption under strict coupling constraints, the complex non-convex optimization problem is decoupled into a hierarchical execution framework. First, a sequential distributed optimization algorithm based on Second-Order Cone Programming (SOCP) is proposed to optimize the 3D flight trajectory of each UAV, ensuring adaptive network coverage. Second, a novel hybrid resource scheduling paradigm synergizing Deep Reinforcement Learning (DRL) and Large Language Models (LLMs) is developed. Within this framework, the DRL agent dictates the initial resource allocation, while the LLM acts as a semantic macro-scheduler to rectify long-tail allocation imbalances for failed and surplus tasks. Crucially, a reward decoupling mechanism is introduced to isolate DRL training from external LLM interventions, thereby ensuring policy convergence. Finally, the task offloading ratios are precisely determined via Linear Programming (LP) within an alternating optimization loop. Simulation results demonstrate that the proposed method significantly outperforms traditional multi-agent reinforcement learning baselines in terms of task success rate and system efficiency.
Single-Step Six-Dimensional Movable Antenna Reconfiguration for High-Mobility IoV: Modeling, Analysis, and Optimization
May 05, 2026The Six-Dimensional Movable Antenna (6DMA) system has emerged as a promising technology to enhance wireless capacity by fully exploiting spatial degrees of freedom. However, applying 6DMA to high-mobility Internet of Vehicles (IoV) scenarios faces significant challenges, primarily due to the difficulty of acquiring instantaneous Channel State Information (CSI) and the risk of service interruptions caused by mechanical reconfiguration delays. To address these issues, this paper proposes a low-complexity, CSI-free single-step reconfiguration framework. First, we design a deterministic discrete position generation scheme based on a latitude-longitude grid with inherent topological structures. Leveraging graph theory, we explicitly model and theoretically derive the lower bounds of movement and time costs for antenna reconfiguration. Subsequently, utilizing the directional sparsity of 6DMA channels, we develop an adaptive optimization strategy that fuses offline environmental priors with online historical feedback. Furthermore, a periodic reconfiguration mechanism based on predicted cumulative vehicle distributions is introduced. By strictly restricting antenna adjustments to the first-order spatial neighborhood, the proposed single-step method effectively eliminates service interruptions. Simulation results demonstrate that the proposed scheme significantly outperforms traditional fixed and global-search-based benchmarks in terms of uplink sum rate, while incurring negligible mechanical overhead and latency, thereby validating its feasibility and robustness in highly dynamic vehicular networks.
Distributed Deep Reinforcement Learning Based Gradient Quantization for Federated Learning Enabled Vehicle Edge Computing
Jul 11, 2024



Federated Learning (FL) can protect the privacy of the vehicles in vehicle edge computing (VEC) to a certain extent through sharing the gradients of vehicles' local models instead of local data. The gradients of vehicles' local models are usually large for the vehicular artificial intelligence (AI) applications, thus transmitting such large gradients would cause large per-round latency. Gradient quantization has been proposed as one effective approach to reduce the per-round latency in FL enabled VEC through compressing gradients and reducing the number of bits, i.e., the quantization level, to transmit gradients. The selection of quantization level and thresholds determines the quantization error, which further affects the model accuracy and training time. To do so, the total training time and quantization error (QE) become two key metrics for the FL enabled VEC. It is critical to jointly optimize the total training time and QE for the FL enabled VEC. However, the time-varying channel condition causes more challenges to solve this problem. In this paper, we propose a distributed deep reinforcement learning (DRL)-based quantization level allocation scheme to optimize the long-term reward in terms of the total training time and QE. Extensive simulations identify the optimal weighted factors between the total training time and QE, and demonstrate the feasibility and effectiveness of the proposed scheme.
Anti-Byzantine Attacks Enabled Vehicle Selection for Asynchronous Federated Learning in Vehicular Edge Computing
Apr 12, 2024

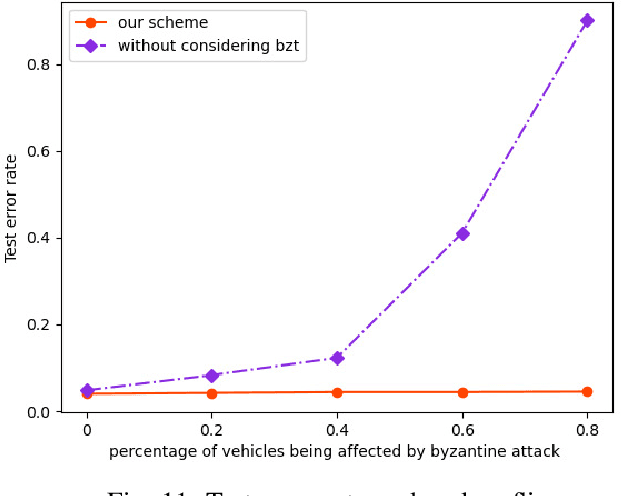

In vehicle edge computing (VEC), asynchronous federated learning (AFL) is used, where the edge receives a local model and updates the global model, effectively reducing the global aggregation latency.Due to different amounts of local data,computing capabilities and locations of the vehicles, renewing the global model with same weight is inappropriate.The above factors will affect the local calculation time and upload time of the local model, and the vehicle may also be affected by Byzantine attacks, leading to the deterioration of the vehicle data. However, based on deep reinforcement learning (DRL), we can consider these factors comprehensively to eliminate vehicles with poor performance as much as possible and exclude vehicles that have suffered Byzantine attacks before AFL. At the same time, when aggregating AFL, we can focus on those vehicles with better performance to improve the accuracy and safety of the system. In this paper, we proposed a vehicle selection scheme based on DRL in VEC. In this scheme, vehicle s mobility, channel conditions with temporal variations, computational resources with temporal variations, different data amount, transmission channel status of vehicles as well as Byzantine attacks were taken into account.Simulation results show that the proposed scheme effectively improves the safety and accuracy of the global model.
Asynchronous Federated Learning for Edge-assisted Vehicular Networks
Aug 03, 2022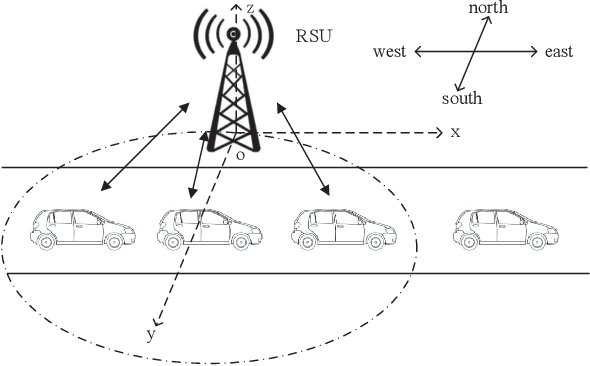
Vehicular networks enable vehicles support real-time vehicular applications through training data. Due to the limited computing capability, vehicles usually transmit data to a road side unit (RSU) at the network edge to process data. However, vehicles are usually reluctant to share data with each other due to the privacy issue. For the traditional federated learning (FL), vehicles train the data locally to obtain a local model and then upload the local model to the RSU to update the global model, thus the data privacy can be protected through sharing model parameters instead of data. The traditional FL updates the global model synchronously, i.e., the RSU needs to wait for all vehicles to upload their models for the global model updating. However, vehicles may usually drive out of the coverage of the RSU before they obtain their local models through training, which reduces the accuracy of the global model. It is necessary to propose an asynchronous federated learning (AFL) to solve this problem, where the RSU updates the global model once it receives a local model from a vehicle. However, the amount of data, computing capability and vehicle mobility may affect the accuracy of the global model. In this paper, we jointly consider the amount of data, computing capability and vehicle mobility to design an AFL scheme to improve the accuracy of the global model. Extensive simulation experiments have demonstrated that our scheme outperforms the FL scheme
Towards V2I Age-aware Fairness Access: A DQN Based Intelligent Vehicular Node Training and Test Method
Aug 02, 2022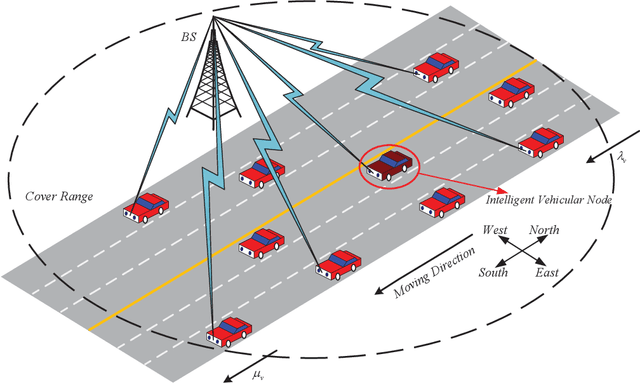
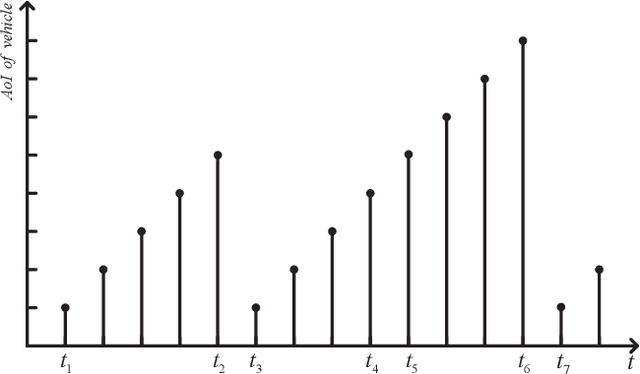
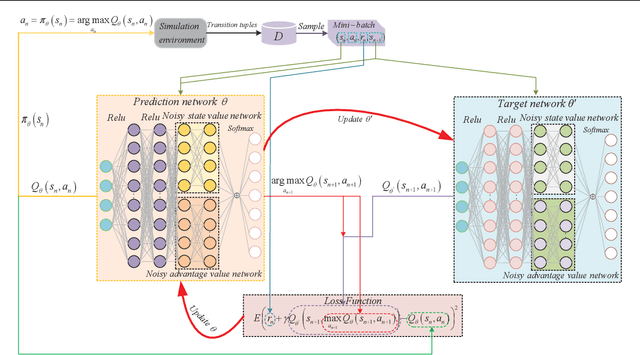
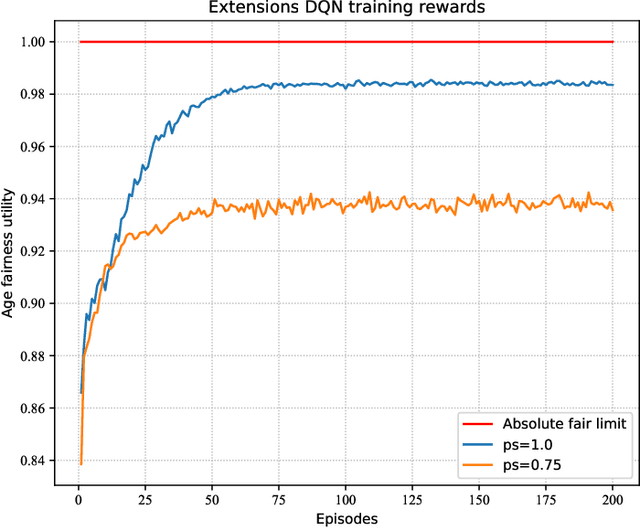
Vehicles on the road exchange data with base station (BS) frequently through vehicle to infrastructure (V2I) communications to ensure the normal use of vehicular applications, where the IEEE 802.11 distributed coordination function (DCF) is employed to allocate a minimum contention window (MCW) for channel access. Each vehicle may change its MCW to achieve more access opportunities at the expense of others, which results in unfair communication performance. Moreover, the key access parameters MCW is the privacy information and each vehicle are not willing to share it with other vehicles. In this uncertain setting, age of information (AoI) is an important communication metric to measure the freshness of data, we design an intelligent vehicular node to learn the dynamic environment and predict the optimal MCW which can make it achieve age fairness. In order to allocate the optimal MCW for the vehicular node, we employ a learning algorithm to make a desirable decision by learning from replay history data. In particular, the algorithm is proposed by extending the traditional DQN training and testing method. Finally, by comparing with other methods, it is proved that the proposed DQN method can significantly improve the age fairness of the intelligent node.
Mobility-Aware Cooperative Caching in Vehicular Edge Computing Based on Asynchronous Federated and Deep Reinforcement Learning
Aug 02, 2022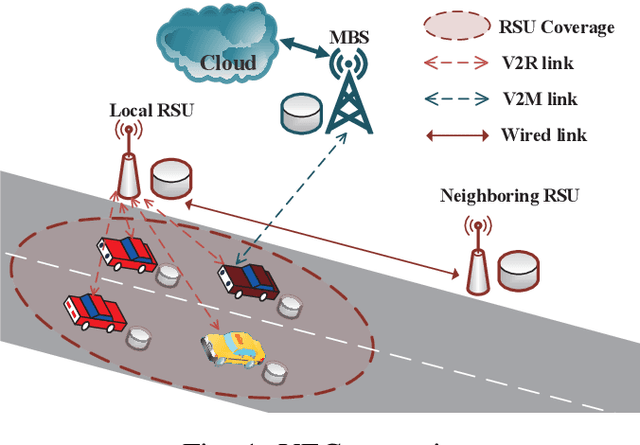

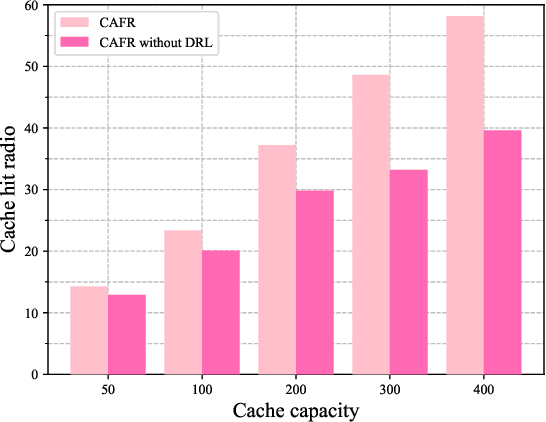
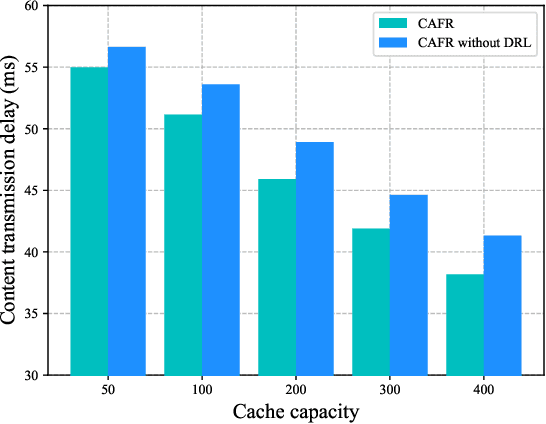
The vehicular edge computing (VEC) can cache contents in different RSUs at the network edge to support the real-time vehicular applications. In VEC, owing to the high-mobility characteristics of vehicles, it is necessary to cache the user data in advance and learn the most popular and interesting contents for vehicular users. Since user data usually contains privacy information, users are reluctant to share their data with others. To solve this problem, traditional federated learning (FL) needs to update the global model synchronously through aggregating all users' local models to protect users' privacy. However, vehicles may frequently drive out of the coverage area of the VEC before they achieve their local model trainings and thus the local models cannot be uploaded as expected, which would reduce the accuracy of the global model. In addition, the caching capacity of the local RSU is limited and the popular contents are diverse, thus the size of the predicted popular contents usually exceeds the cache capacity of the local RSU. Hence, the VEC should cache the predicted popular contents in different RSUs while considering the content transmission delay. In this paper, we consider the mobility of vehicles and propose a cooperative Caching scheme in the VEC based on Asynchronous Federated and deep Reinforcement learning (CAFR). We first consider the mobility of vehicles and propose an asynchronous FL algorithm to obtain an accurate global model, and then propose an algorithm to predict the popular contents based on the global model. In addition, we consider the mobility of vehicles and propose a deep reinforcement learning algorithm to obtain the optimal cooperative caching location for the predicted popular contents in order to optimize the content transmission delay. Extensive experimental results have demonstrated that the CAFR scheme outperforms other baseline caching schemes.