 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn Situ Framework for Coupling Simulation and Machine Learning with Application to CFD
Jun 22, 2023Recent years have seen many successful applications of machine learning (ML) to facilitate fluid dynamic computations. As simulations grow, generating new training datasets for traditional offline learning creates I/O and storage bottlenecks. Additionally, performing inference at runtime requires non-trivial coupling of ML framework libraries with simulation codes. This work offers a solution to both limitations by simplifying this coupling and enabling in situ training and inference workflows on heterogeneous clusters. Leveraging SmartSim, the presented framework deploys a database to store data and ML models in memory, thus circumventing the file system. On the Polaris supercomputer, we demonstrate perfect scaling efficiency to the full machine size of the data transfer and inference costs thanks to a novel co-located deployment of the database. Moreover, we train an autoencoder in situ from a turbulent flow simulation, showing that the framework overhead is negligible relative to a solver time step and training epoch.
QCNN: Quadrature Convolutional Neural Network with Application to Unstructured Data Compression
Nov 09, 2022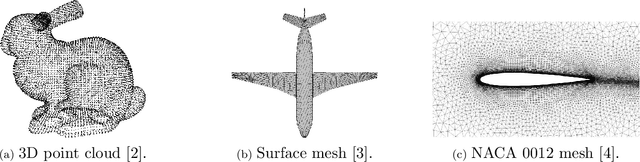
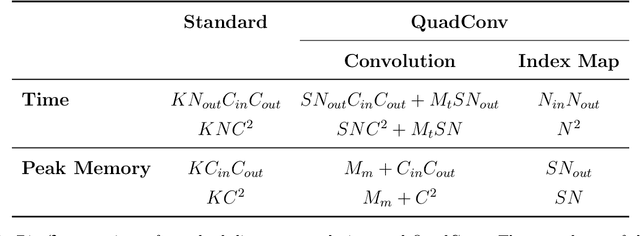
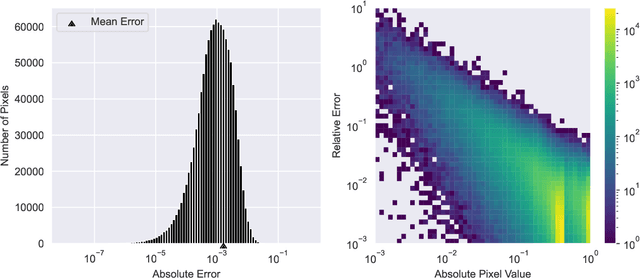
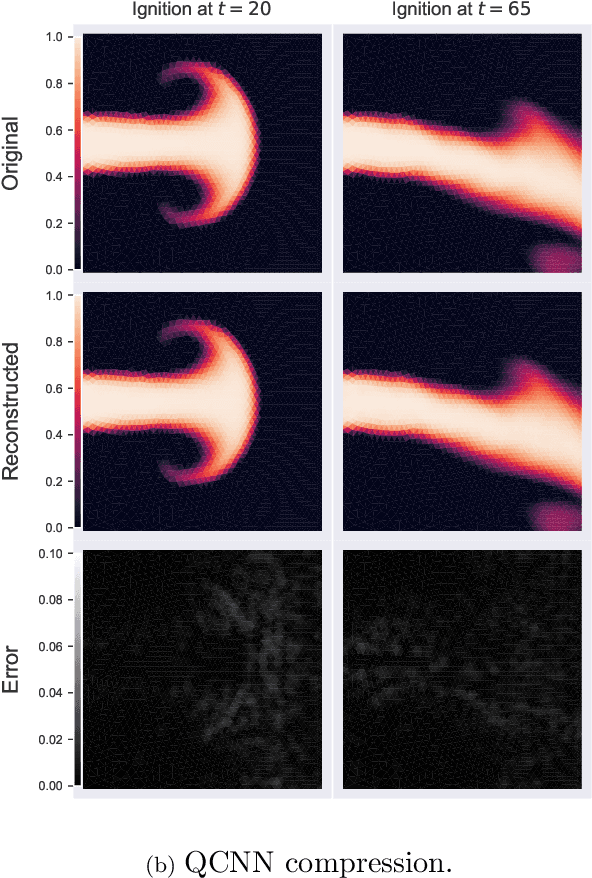
We present a new convolution layer for deep learning architectures which we call QuadConv -- an approximation to continuous convolution via quadrature. Our operator is developed explicitly for use on unstructured data, and accomplishes this by learning a continuous kernel that can be sampled at arbitrary locations. In the setting of neural compression, we show that a QuadConv-based autoencoder, resulting in a Quadrature Convolutional Neural Network (QCNN), can match the performance of standard discrete convolutions on structured uniform data, as in CNNs, and maintain this accuracy on unstructured data.
Embedded Neural Networks for Robot Autonomy
Nov 10, 2019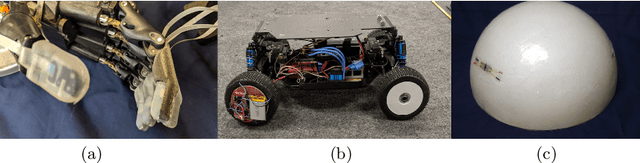
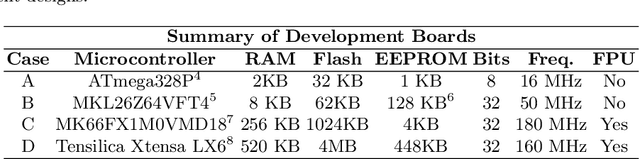
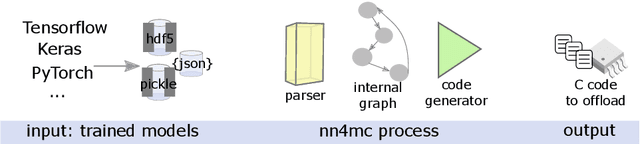
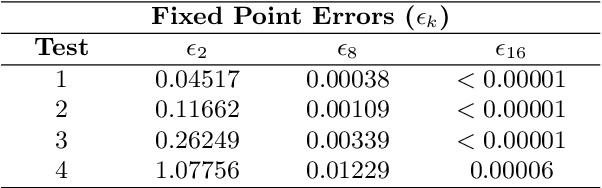
We present a library to automatically embed signal processing and neural network predictions into the material robots are made of. Deep and shallow neural network models are first trained offline using state-of-the-art machine learning tools and then transferred onto general purpose microcontrollers that are co-located with a robot's sensors and actuators. We validate this approach using multiple examples: a smart robotic tire for terrain classification, a robotic finger sensor for load classification and a smart composite capable of regressing impact source localization. In each example, sensing and computation are embedded inside the material, creating artifacts that serve as stand-in replacement for otherwise inert conventional parts. The open source software library takes as inputs trained model files from higher level learning software, such as Tensorflow/Keras, and outputs code that is readable in a microcontroller that supports C. We compare the performance of this approach for various embedded platforms. In particular, we show that low-cost off-the-shelf microcontrollers can match the accuracy of a desktop computer, while being fast enough for real-time applications at different neural network configurations. We provide means to estimate the maximum number of parameters that the hardware will support based on the microcontroller's specifications.