 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIndustry 4.0 and Prospects of Circular Economy: A Survey of Robotic Assembly and Disassembly
Jun 14, 2021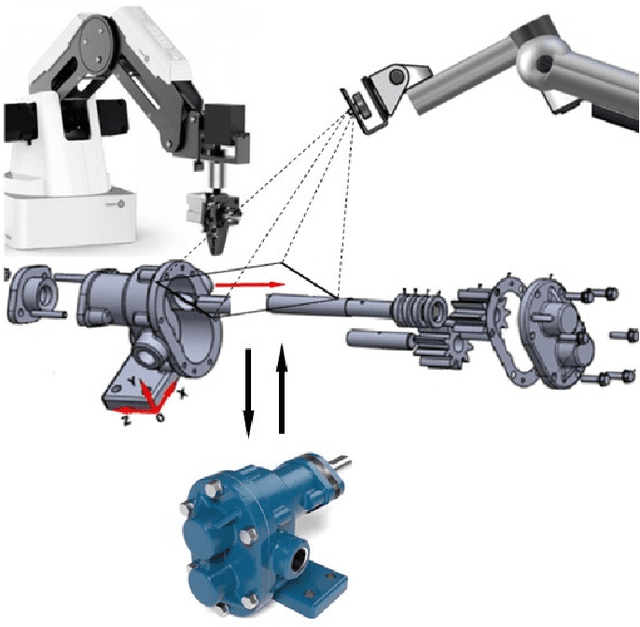
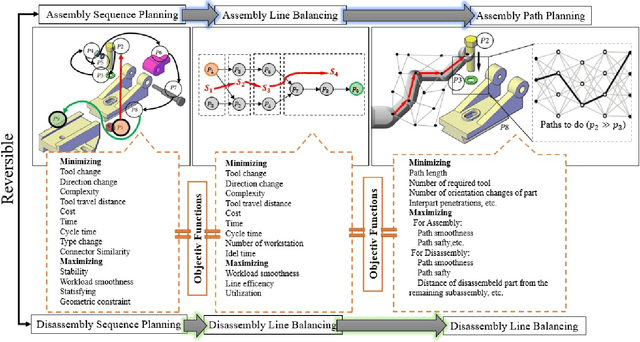
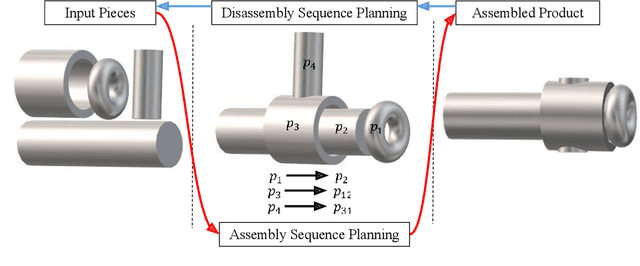
Despite their contributions to the financial efficiency and environmental sustainability of industrial processes, robotic assembly and disassembly have been understudied in the existing literature. This is in contradiction to their importance in realizing the Fourth Industrial Revolution. More specifically, although most of the literature has extensively discussed how to optimally assemble or disassemble given products, the role of other factors has been overlooked. For example, the types of robots involved in implementing the sequence plans, which should ideally be taken into account throughout the whole chain consisting of design, assembly, disassembly and reassembly. Isolating the foregoing operations from the rest of the components of the relevant ecosystems may lead to erroneous inferences toward both the necessity and efficiency of the underlying procedures. In this paper we try to alleviate these shortcomings by comprehensively investigating the state-of-the-art in robotic assembly and disassembly. We consider and review various aspects of manufacturing and remanufacturing frameworks while particularly focusing on their desirability for supporting a circular economy.
Computing the Testing Error without a Testing Set
May 01, 2020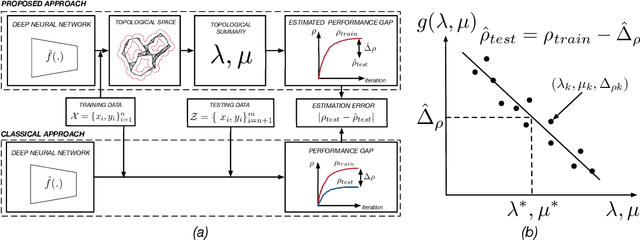

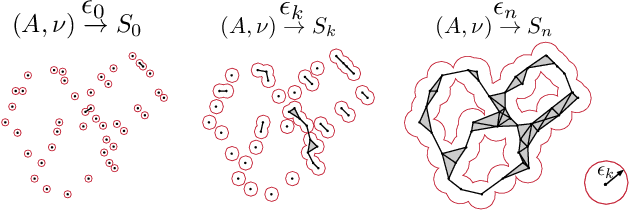
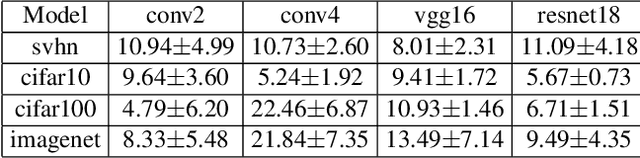
Deep Neural Networks (DNNs) have revolutionized computer vision. We now have DNNs that achieve top (performance) results in many problems, including object recognition, facial expression analysis, and semantic segmentation, to name but a few. The design of the DNNs that achieve top results is, however, non-trivial and mostly done by trail-and-error. That is, typically, researchers will derive many DNN architectures (i.e., topologies) and then test them on multiple datasets. However, there are no guarantees that the selected DNN will perform well in the real world. One can use a testing set to estimate the performance gap between the training and testing sets, but avoiding overfitting-to-the-testing-data is almost impossible. Using a sequestered testing dataset may address this problem, but this requires a constant update of the dataset, a very expensive venture. Here, we derive an algorithm to estimate the performance gap between training and testing that does not require any testing dataset. Specifically, we derive a number of persistent topology measures that identify when a DNN is learning to generalize to unseen samples. This allows us to compute the DNN's testing error on unseen samples, even when we do not have access to them. We provide extensive experimental validation on multiple networks and datasets to demonstrate the feasibility of the proposed approach.
Survey on RGB, 3D, Thermal, and Multimodal Approaches for Facial Expression Recognition: History, Trends, and Affect-related Applications
Jun 10, 2016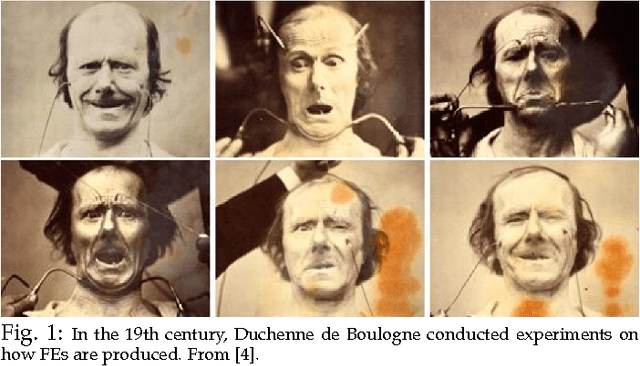
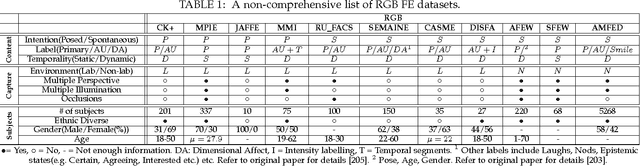
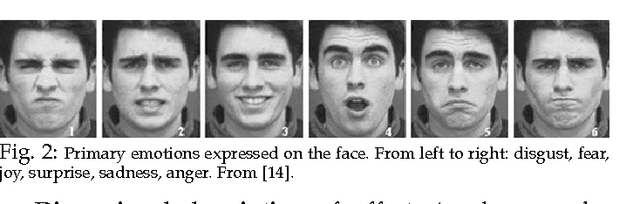
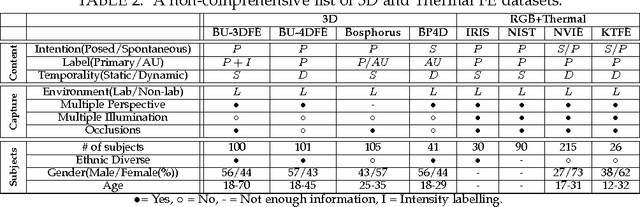
Facial expressions are an important way through which humans interact socially. Building a system capable of automatically recognizing facial expressions from images and video has been an intense field of study in recent years. Interpreting such expressions remains challenging and much research is needed about the way they relate to human affect. This paper presents a general overview of automatic RGB, 3D, thermal and multimodal facial expression analysis. We define a new taxonomy for the field, encompassing all steps from face detection to facial expression recognition, and describe and classify the state of the art methods accordingly. We also present the important datasets and the bench-marking of most influential methods. We conclude with a general discussion about trends, important questions and future lines of research.