 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Robust Fairness via Balance Adversarial Training
Sep 15, 2022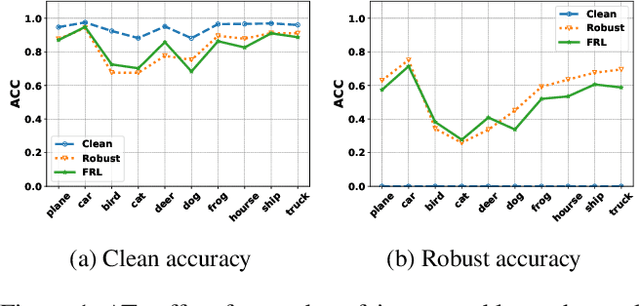
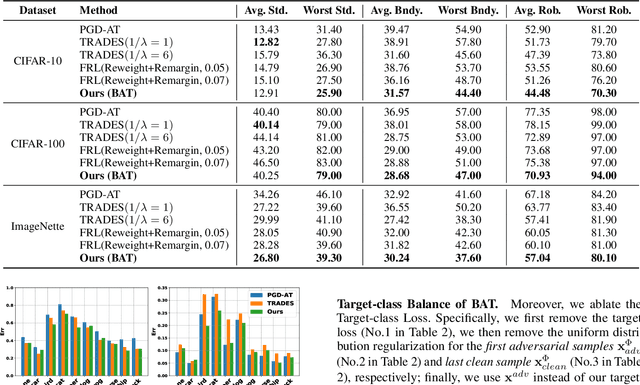
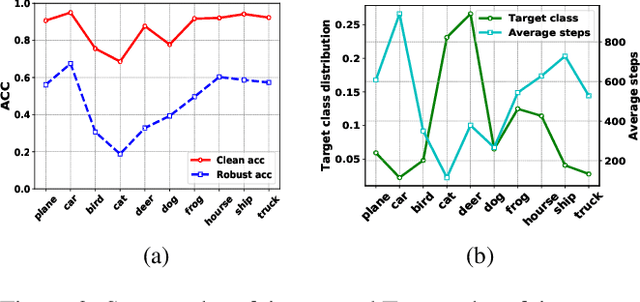

Adversarial training (AT) methods are effective against adversarial attacks, yet they introduce severe disparity of accuracy and robustness between different classes, known as the robust fairness problem. Previously proposed Fair Robust Learning (FRL) adaptively reweights different classes to improve fairness. However, the performance of the better-performed classes decreases, leading to a strong performance drop. In this paper, we observed two unfair phenomena during adversarial training: different difficulties in generating adversarial examples from each class (source-class fairness) and disparate target class tendencies when generating adversarial examples (target-class fairness). From the observations, we propose Balance Adversarial Training (BAT) to address the robust fairness problem. Regarding source-class fairness, we adjust the attack strength and difficulties of each class to generate samples near the decision boundary for easier and fairer model learning; considering target-class fairness, by introducing a uniform distribution constraint, we encourage the adversarial example generation process for each class with a fair tendency. Extensive experiments conducted on multiple datasets (CIFAR-10, CIFAR-100, and ImageNette) demonstrate that our method can significantly outperform other baselines in mitigating the robust fairness problem (+5-10\% on the worst class accuracy)
Semantic Segmentation-Assisted Instance Feature Fusion for Multi-Level 3D Part Instance Segmentation
Aug 09, 2022

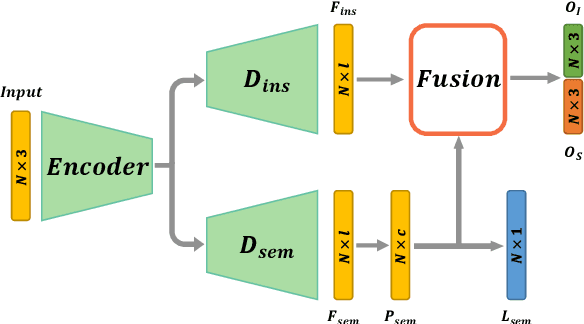

Recognizing 3D part instances from a 3D point cloud is crucial for 3D structure and scene understanding. Several learning-based approaches use semantic segmentation and instance center prediction as training tasks and fail to further exploit the inherent relationship between shape semantics and part instances. In this paper, we present a new method for 3D part instance segmentation. Our method exploits semantic segmentation to fuse nonlocal instance features, such as center prediction, and further enhances the fusion scheme in a multi- and cross-level way. We also propose a semantic region center prediction task to train and leverage the prediction results to improve the clustering of instance points. Our method outperforms existing methods with a large-margin improvement in the PartNet benchmark. We also demonstrate that our feature fusion scheme can be applied to other existing methods to improve their performance in indoor scene instance segmentation tasks.