 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMovement Primitive Diffusion: Learning Gentle Robotic Manipulation of Deformable Objects
Dec 15, 2023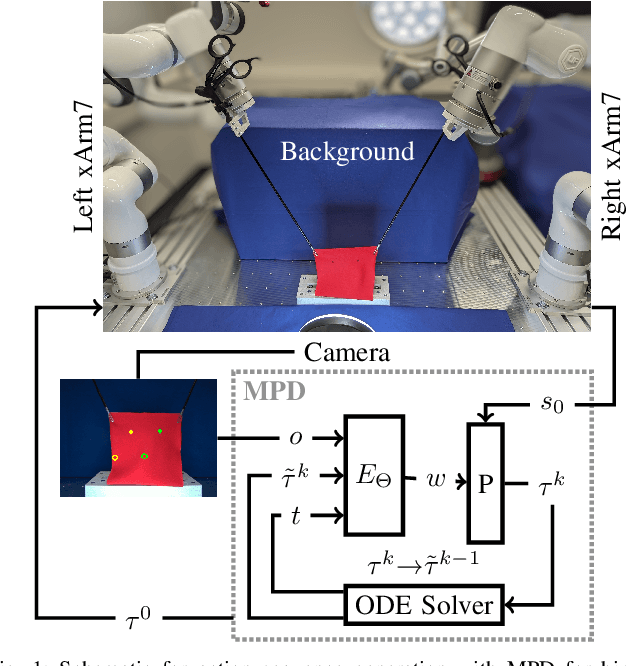
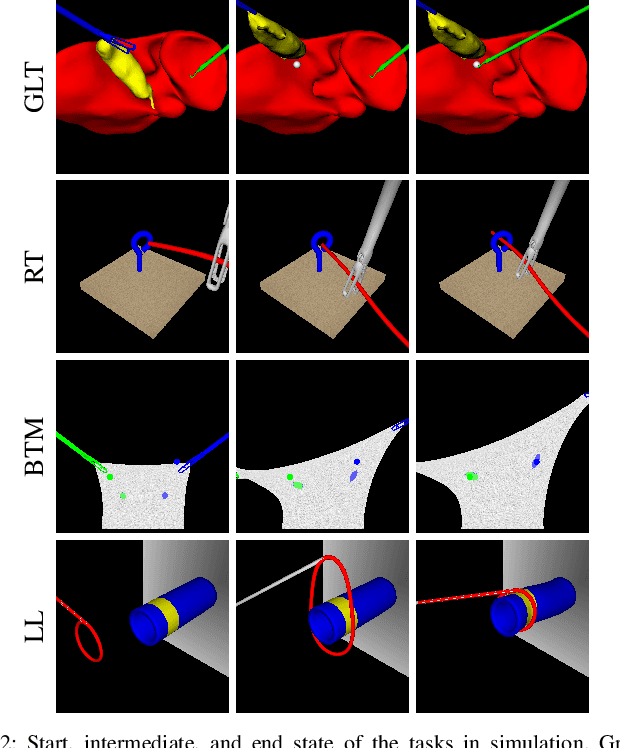
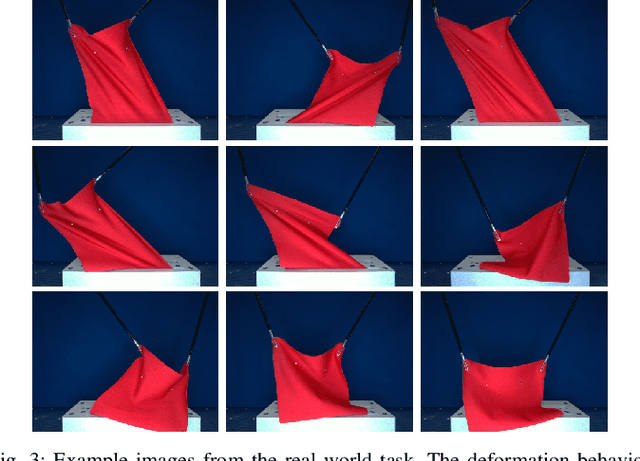
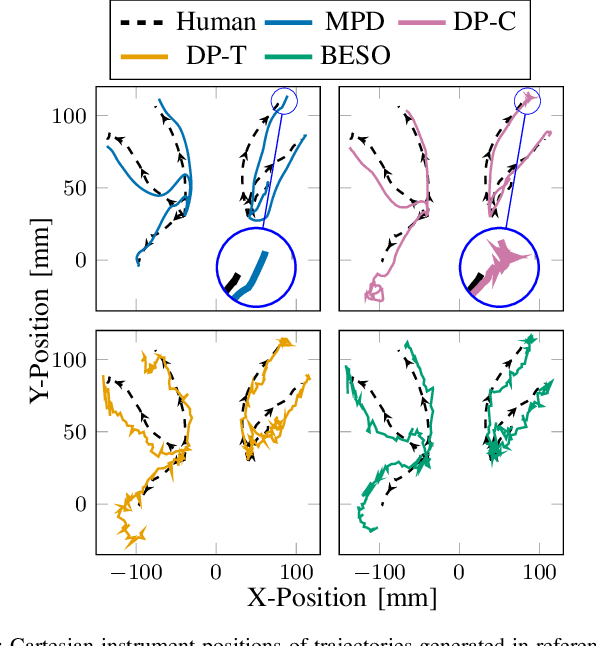
Policy learning in robot-assisted surgery (RAS) lacks data efficient and versatile methods that exhibit the desired motion quality for delicate surgical interventions. To this end, we introduce Movement Primitive Diffusion (MPD), a novel method for imitation learning (IL) in RAS that focuses on gentle manipulation of deformable objects. The approach combines the versatility of diffusion-based imitation learning (DIL) with the high-quality motion generation capabilities of Probabilistic Dynamic Movement Primitives (ProDMPs). This combination enables MPD to achieve gentle manipulation of deformable objects, while maintaining data efficiency critical for RAS applications where demonstration data is scarce. We evaluate MPD across various simulated tasks and a real world robotic setup on both state and image observations. MPD outperforms state-of-the-art DIL methods in success rate, motion quality, and data efficiency.
LapGym -- An Open Source Framework for Reinforcement Learning in Robot-Assisted Laparoscopic Surgery
Feb 19, 2023



Recent advances in reinforcement learning (RL) have increased the promise of introducing cognitive assistance and automation to robot-assisted laparoscopic surgery (RALS). However, progress in algorithms and methods depends on the availability of standardized learning environments that represent skills relevant to RALS. We present LapGym, a framework for building RL environments for RALS that models the challenges posed by surgical tasks, and sofa_env, a diverse suite of 12 environments. Motivated by surgical training, these environments are organized into 4 tracks: Spatial Reasoning, Deformable Object Manipulation & Grasping, Dissection, and Thread Manipulation. Each environment is highly parametrizable for increasing difficulty, resulting in a high performance ceiling for new algorithms. We use Proximal Policy Optimization (PPO) to establish a baseline for model-free RL algorithms, investigating the effect of several environment parameters on task difficulty. Finally, we show that many environments and parameter configurations reflect well-known, open problems in RL research, allowing researchers to continue exploring these fundamental problems in a surgical context. We aim to provide a challenging, standard environment suite for further development of RL for RALS, ultimately helping to realize the full potential of cognitive surgical robotics. LapGym is publicly accessible through GitHub (https://github.com/ScheiklP/lap_gym).