 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMovement Primitive Diffusion: Learning Gentle Robotic Manipulation of Deformable Objects
Paper and Code
Dec 15, 2023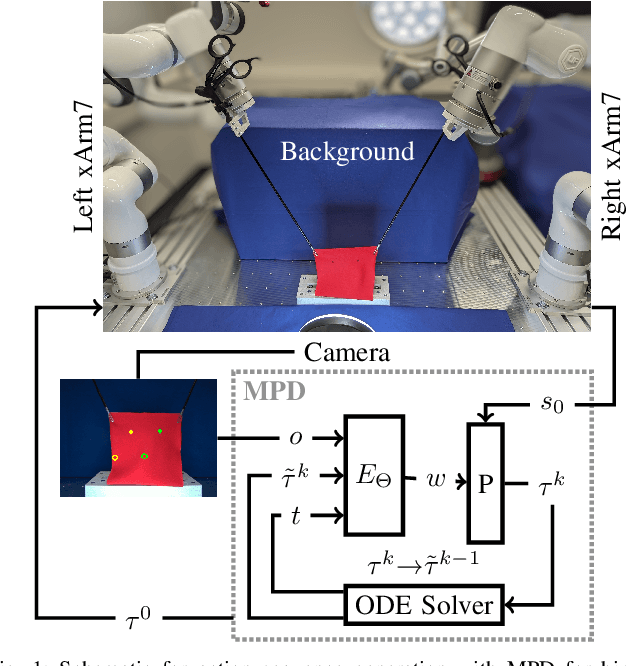
Policy learning in robot-assisted surgery (RAS) lacks data efficient and versatile methods that exhibit the desired motion quality for delicate surgical interventions. To this end, we introduce Movement Primitive Diffusion (MPD), a novel method for imitation learning (IL) in RAS that focuses on gentle manipulation of deformable objects. The approach combines the versatility of diffusion-based imitation learning (DIL) with the high-quality motion generation capabilities of Probabilistic Dynamic Movement Primitives (ProDMPs). This combination enables MPD to achieve gentle manipulation of deformable objects, while maintaining data efficiency critical for RAS applications where demonstration data is scarce. We evaluate MPD across various simulated tasks and a real world robotic setup on both state and image observations. MPD outperforms state-of-the-art DIL methods in success rate, motion quality, and data efficiency.