 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePragmatic auditing: a pilot-driven approach for auditing Machine Learning systems
May 21, 2024



The growing adoption and deployment of Machine Learning (ML) systems came with its share of ethical incidents and societal concerns. It also unveiled the necessity to properly audit these systems in light of ethical principles. For such a novel type of algorithmic auditing to become standard practice, two main prerequisites need to be available: A lifecycle model that is tailored towards transparency and accountability, and a principled risk assessment procedure that allows the proper scoping of the audit. Aiming to make a pragmatic step towards a wider adoption of ML auditing, we present a respective procedure that extends the AI-HLEG guidelines published by the European Commission. Our audit procedure is based on an ML lifecycle model that explicitly focuses on documentation, accountability, and quality assurance; and serves as a common ground for alignment between the auditors and the audited organisation. We describe two pilots conducted on real-world use cases from two different organisations and discuss the shortcomings of ML algorithmic auditing as well as future directions thereof.
Enhancing Object Detection Performance for Small Objects through Synthetic Data Generation and Proportional Class-Balancing Technique: A Comparative Study in Industrial Scenarios
Jan 29, 2024



Object Detection (OD) has proven to be a significant computer vision method in extracting localized class information and has multiple applications in the industry. Although many of the state-of-the-art (SOTA) OD models perform well on medium and large sized objects, they seem to under perform on small objects. In most of the industrial use cases, it is difficult to collect and annotate data for small objects, as it is time-consuming and prone to human errors. Additionally, those datasets are likely to be unbalanced and often result in an inefficient model convergence. To tackle this challenge, this study presents a novel approach that injects additional data points to improve the performance of the OD models. Using synthetic data generation, the difficulties in data collection and annotations for small object data points can be minimized and to create a dataset with balanced distribution. This paper discusses the effects of a simple proportional class-balancing technique, to enable better anchor matching of the OD models. A comparison was carried out on the performances of the SOTA OD models: YOLOv5, YOLOv7 and SSD, for combinations of real and synthetic datasets within an industrial use case.
Small Object Detection for Near Real-Time Egocentric Perception in a Manual Assembly Scenario
Jun 11, 2021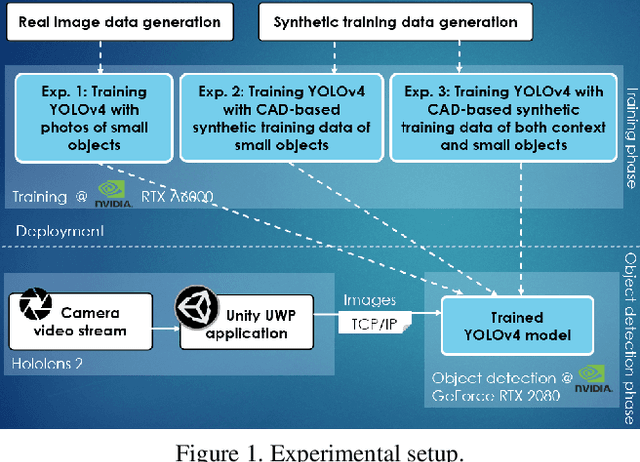
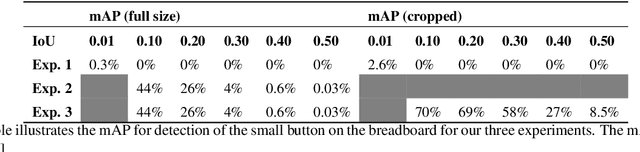
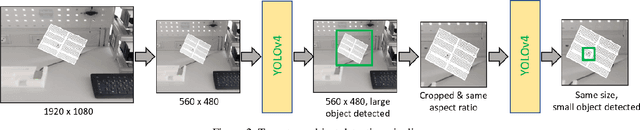
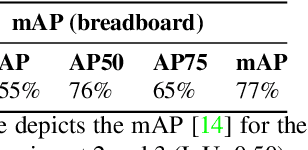
Detecting small objects in video streams of head-worn augmented reality devices in near real-time is a huge challenge: training data is typically scarce, the input video stream can be of limited quality, and small objects are notoriously hard to detect. In industrial scenarios, however, it is often possible to leverage contextual knowledge for the detection of small objects. Furthermore, CAD data of objects are typically available and can be used to generate synthetic training data. We describe a near real-time small object detection pipeline for egocentric perception in a manual assembly scenario: We generate a training data set based on CAD data and realistic backgrounds in Unity. We then train a YOLOv4 model for a two-stage detection process: First, the context is recognized, then the small object of interest is detected. We evaluate our pipeline on the augmented reality device Microsoft Hololens 2.