 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhononic materials with effectively scale-separated hierarchical features using interpretable machine learning
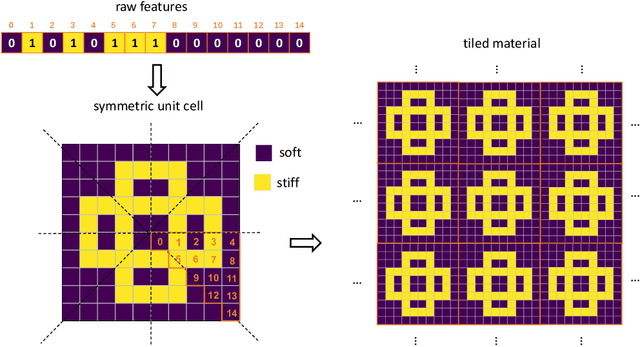
Aug 15, 2024Manipulating the dispersive characteristics of vibrational waves is beneficial for many applications, e.g., high-precision instruments. architected hierarchical phononic materials have sparked promise tunability of elastodynamic waves and vibrations over multiple frequency ranges. In this article, hierarchical unit-cells are obtained, where features at each length scale result in a band gap within a targeted frequency range. Our novel approach, the ``hierarchical unit-cell template method,'' is an interpretable machine-learning approach that uncovers global unit-cell shape/topology patterns corresponding to predefined band-gap objectives. A scale-separation effect is observed where the coarse-scale band-gap objective is mostly unaffected by the fine-scale features despite the closeness of their length scales, thus enabling an efficient hierarchical algorithm. Moreover, the hierarchical patterns revealed are not predefined or self-similar hierarchies as common in current hierarchical phononic materials. Thus, our approach offers a flexible and efficient method for the exploration of new regions in the hierarchical design space, extracting minimal effective patterns for inverse design in applications targeting multiple frequency ranges.
How to See Hidden Patterns in Metamaterials with Interpretable Machine Learning
Nov 10, 2021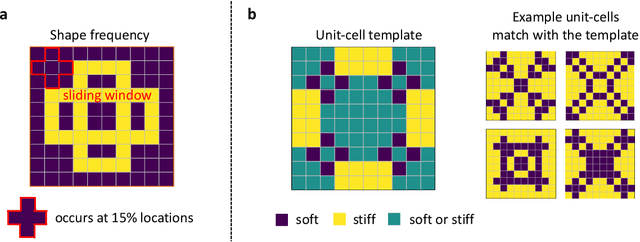

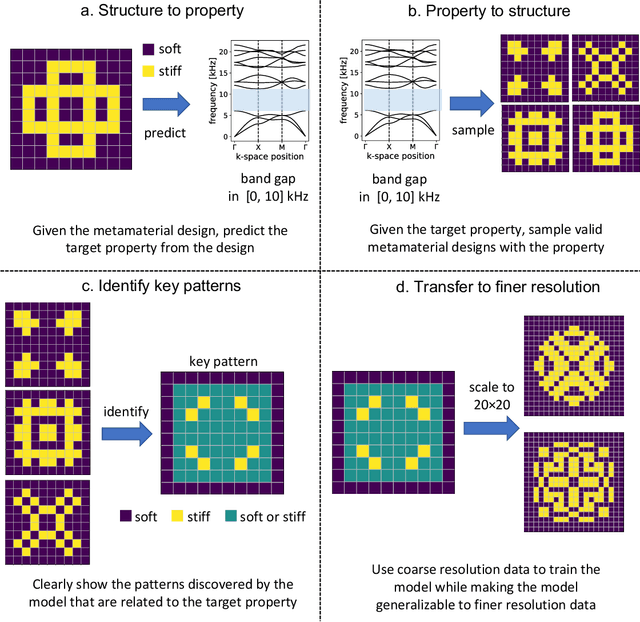
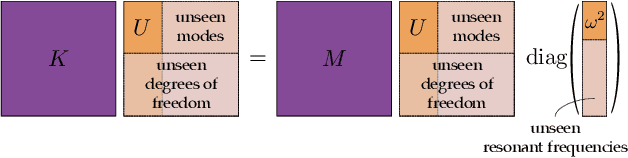
Metamaterials are composite materials with engineered geometrical micro- and meso-structures that can lead to uncommon physical properties, like negative Poisson's ratio or ultra-low shear resistance. Periodic metamaterials are composed of repeating unit-cells, and geometrical patterns within these unit-cells influence the propagation of elastic or acoustic waves and control dispersion. In this work, we develop a new interpretable, multi-resolution machine learning framework for finding patterns in the unit-cells of materials that reveal their dynamic properties. Specifically, we propose two new interpretable representations of metamaterials, called shape-frequency features and unit-cell templates. Machine learning models built using these feature classes can accurately predict dynamic material properties. These feature representations (particularly the unit-cell templates) have a useful property: they can operate on designs of higher resolutions. By learning key coarse scale patterns that can be reliably transferred to finer resolution design space via the shape-frequency features or unit-cell templates, we can almost freely design the fine resolution features of the unit-cell without changing coarse scale physics. Through this multi-resolution approach, we are able to design materials that possess target frequency ranges in which waves are allowed or disallowed to propagate (frequency bandgaps). Our approach yields major benefits: (1) unlike typical machine learning approaches to materials science, our models are interpretable, (2) our approaches leverage multi-resolution properties, and (3) our approach provides design flexibility.
Visual Vibration Tomography: Estimating Interior Material Properties from Monocular Video
Apr 06, 2021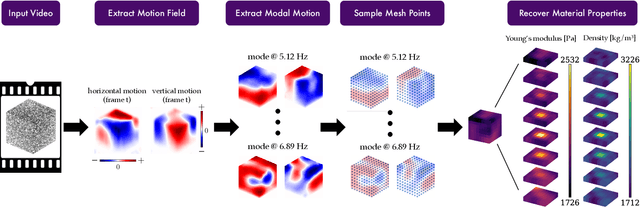

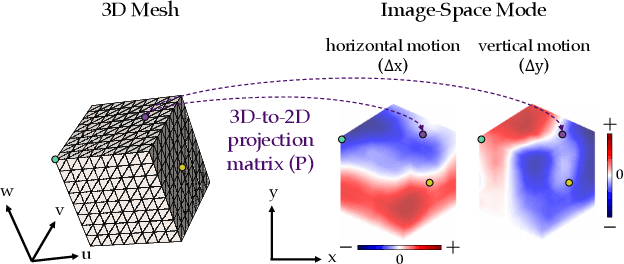
An object's interior material properties, while invisible to the human eye, determine motion observed on its surface. We propose an approach that estimates heterogeneous material properties of an object directly from a monocular video of its surface vibrations. Specifically, we estimate Young's modulus and density throughout a 3D object with known geometry. Knowledge of how these values change across the object is useful for characterizing defects and simulating how the object will interact with different environments. Traditional non-destructive testing approaches, which generally estimate homogenized material properties or the presence of defects, are expensive and use specialized instruments. We propose an approach that leverages monocular video to (1) measure and object's sub-pixel motion and decompose this motion into image-space modes, and (2) directly infer spatially-varying Young's modulus and density values from the observed image-space modes. On both simulated and real videos, we demonstrate that our approach is able to image material properties simply by analyzing surface motion. In particular, our method allows us to identify unseen defects on a 2D drum head from real, high-speed video.
A flexible spiraling-metasurface as a versatile haptic interface
Jun 18, 2020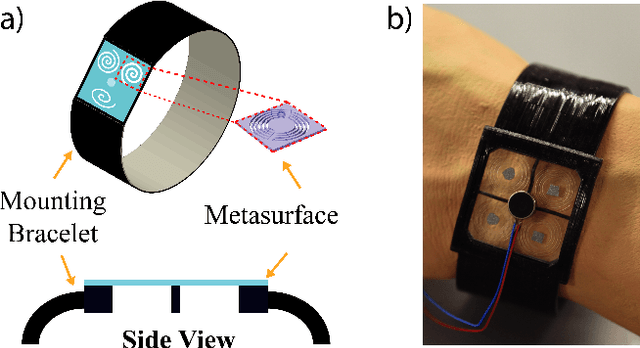
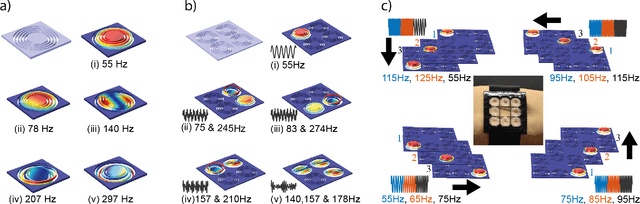
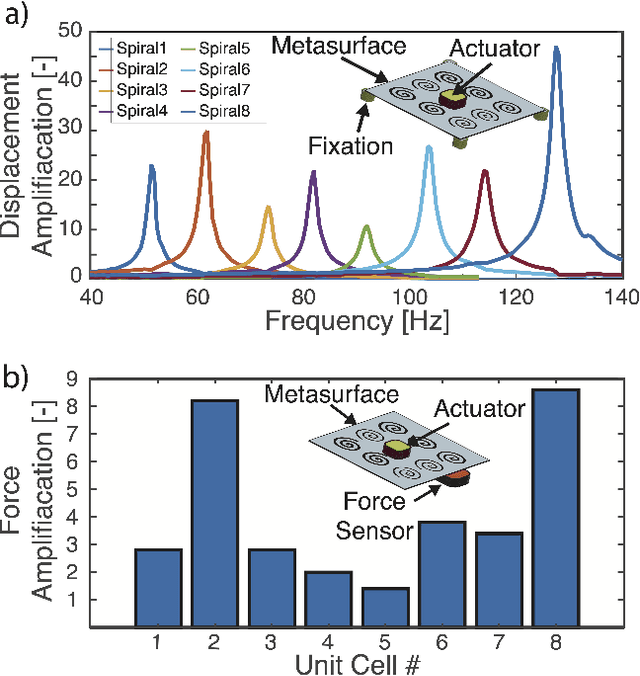
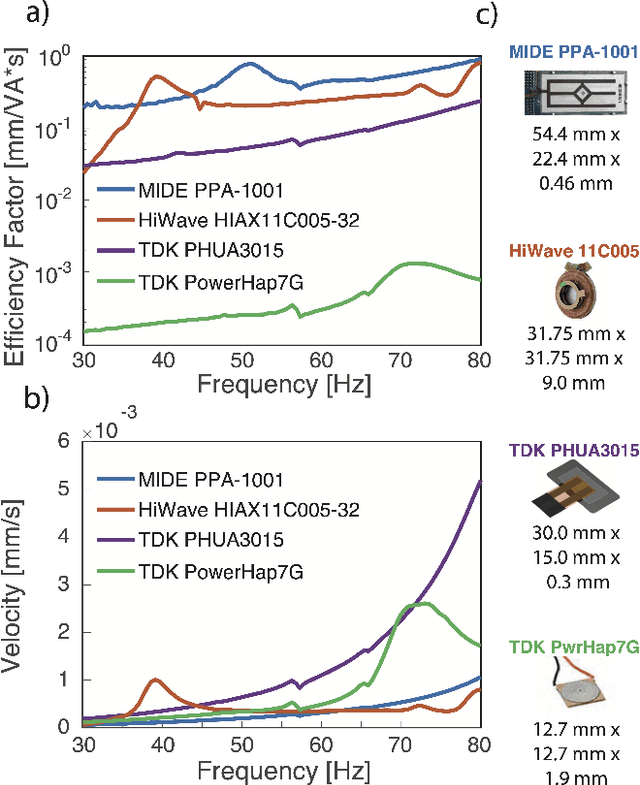
Haptic feedback is the most significant sensory interface following visual cues. Developing thin, flexible surfaces that function as haptic interfaces is important for augmenting virtual reality, wearable devices, robotics and prostheses. For example, adding a haptic feedback interface to prosthesis could improve their acceptance among amputees. State of the art programmable interfaces targeting the skin feel-of-touch through mechano-receptors are limited by inadequate sensory feedback, cumbersome mechanisms or narrow frequency of operation. Here, we present a flexible metasurface as a generic haptic interface capable of producing complex tactile patterns on the human skin at wide range of frequencies. The metasurface is composed of multiple "pixels" that can locally amplify both input displacements and forces. Each of these pixels encodes various deformation patterns capable of producing different sensations on contact. The metasurface can transform a harmonic signal containing multiple frequencies into a complex preprogrammed tactile pattern. Our findings, corroborated by user studies conducted on human candidates, can open new avenues for wearable and robotic interfaces.
Harnessing bistability for directional propulsion of untethered, soft robots
Oct 12, 2017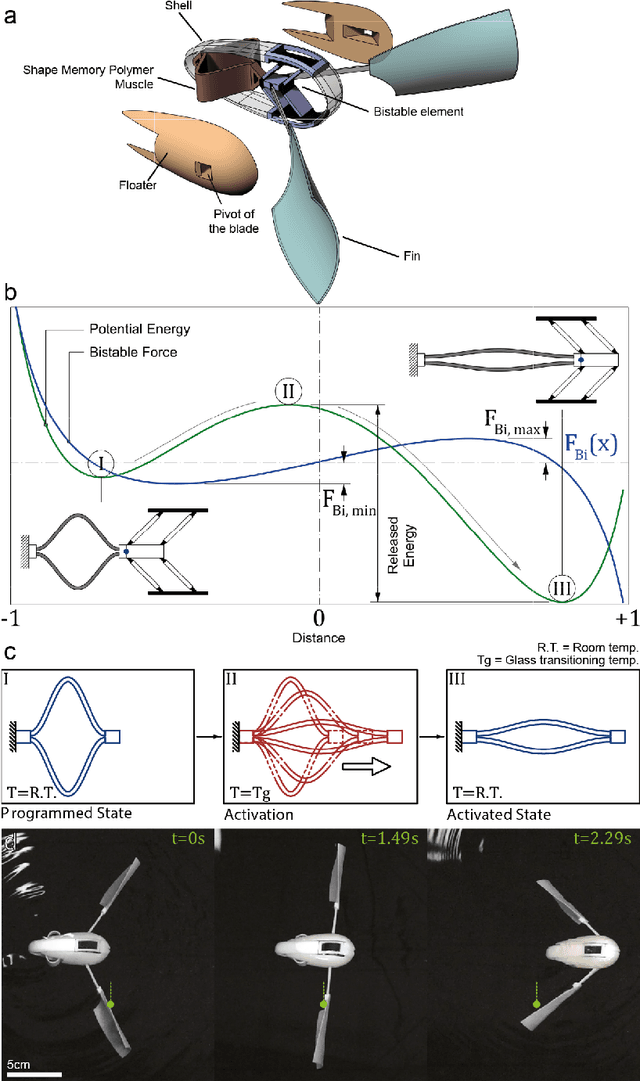
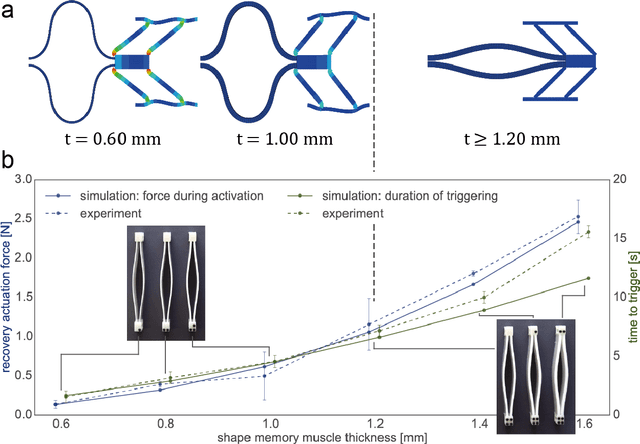
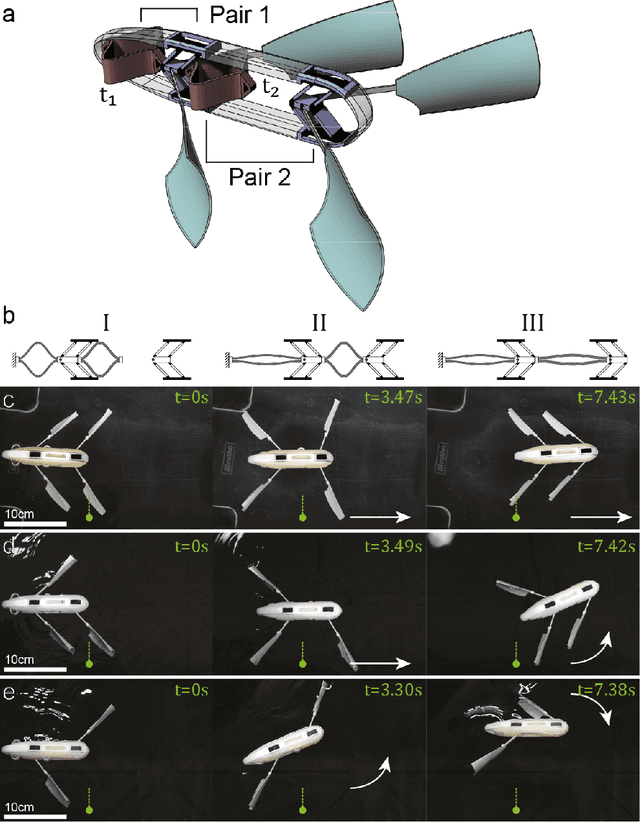
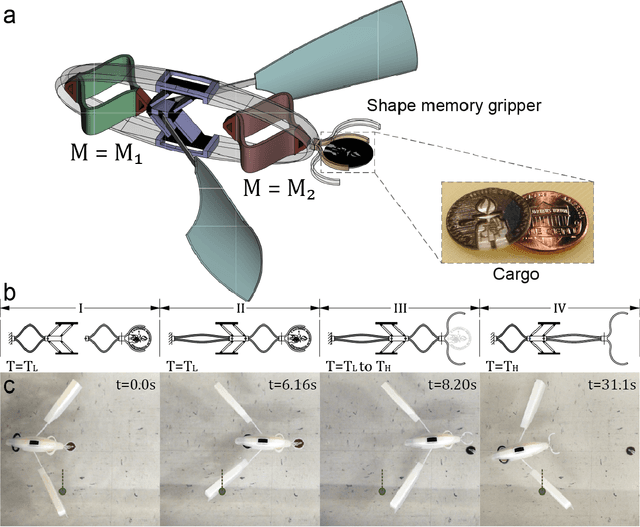
In most macro-scale robotics systems , propulsion and controls are enabled through a physical tether or complex on-board electronics and batteries. A tether simplifies the design process but limits the range of motion of the robot, while on-board controls and power supplies are heavy and complicate the design process. Here we present a simple design principle for an untethered, entirely soft, swimming robot with the ability to achieve preprogrammed, directional propulsion without a battery or on-board electronics. Locomotion is achieved by employing actuators that harness the large displacements of bistable elements, triggered by surrounding temperature changes. Powered by shape memory polymer (SMP) muscles, the bistable elements in turn actuates the robot's fins. Our robots are fabricated entirely using a commercially available 3D printer with no post-processing. As a proof-of-concept, we demonstrate the ability to program a vessel, which can autonomously deliver a cargo and navigate back to the deployment point.