 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA flexible spiraling-metasurface as a versatile haptic interface
Jun 18, 2020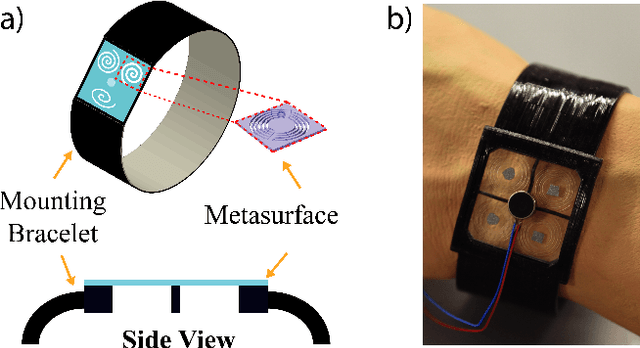
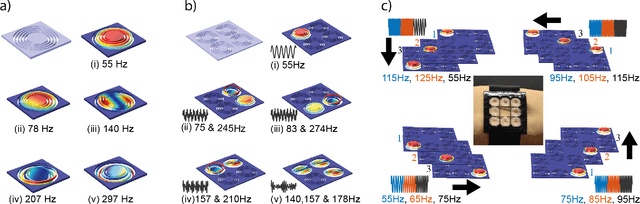
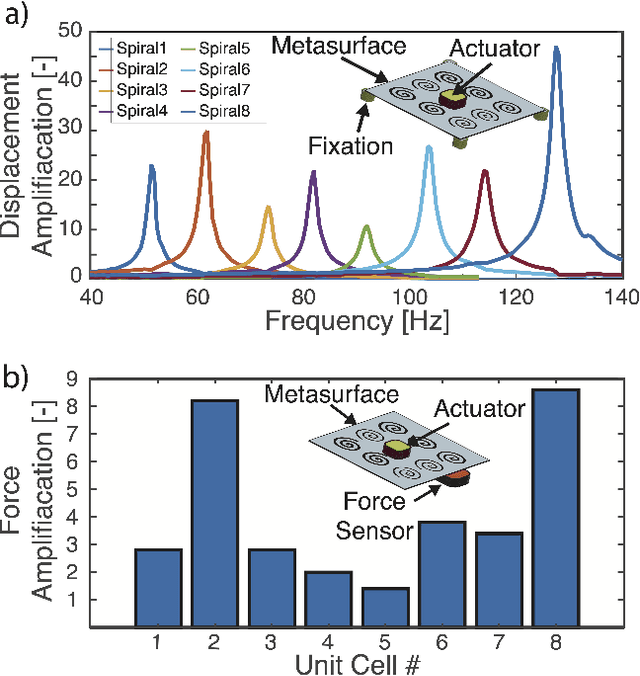
Haptic feedback is the most significant sensory interface following visual cues. Developing thin, flexible surfaces that function as haptic interfaces is important for augmenting virtual reality, wearable devices, robotics and prostheses. For example, adding a haptic feedback interface to prosthesis could improve their acceptance among amputees. State of the art programmable interfaces targeting the skin feel-of-touch through mechano-receptors are limited by inadequate sensory feedback, cumbersome mechanisms or narrow frequency of operation. Here, we present a flexible metasurface as a generic haptic interface capable of producing complex tactile patterns on the human skin at wide range of frequencies. The metasurface is composed of multiple "pixels" that can locally amplify both input displacements and forces. Each of these pixels encodes various deformation patterns capable of producing different sensations on contact. The metasurface can transform a harmonic signal containing multiple frequencies into a complex preprogrammed tactile pattern. Our findings, corroborated by user studies conducted on human candidates, can open new avenues for wearable and robotic interfaces.
Harnessing bistability for directional propulsion of untethered, soft robots
Oct 12, 2017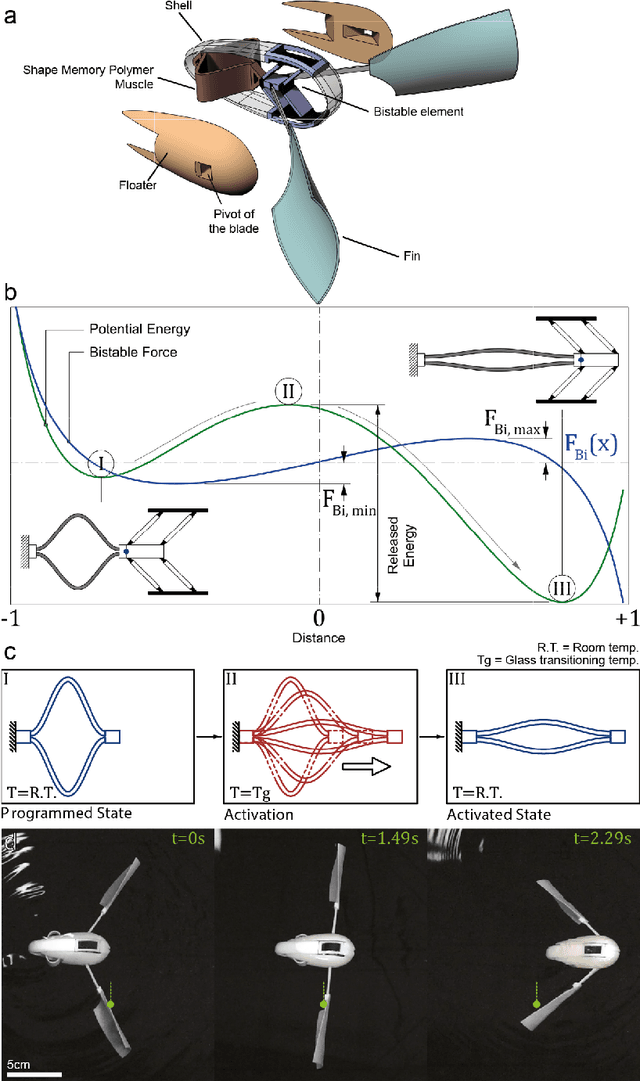
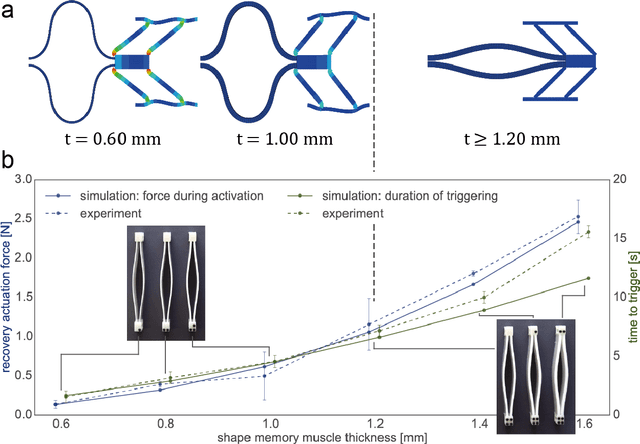
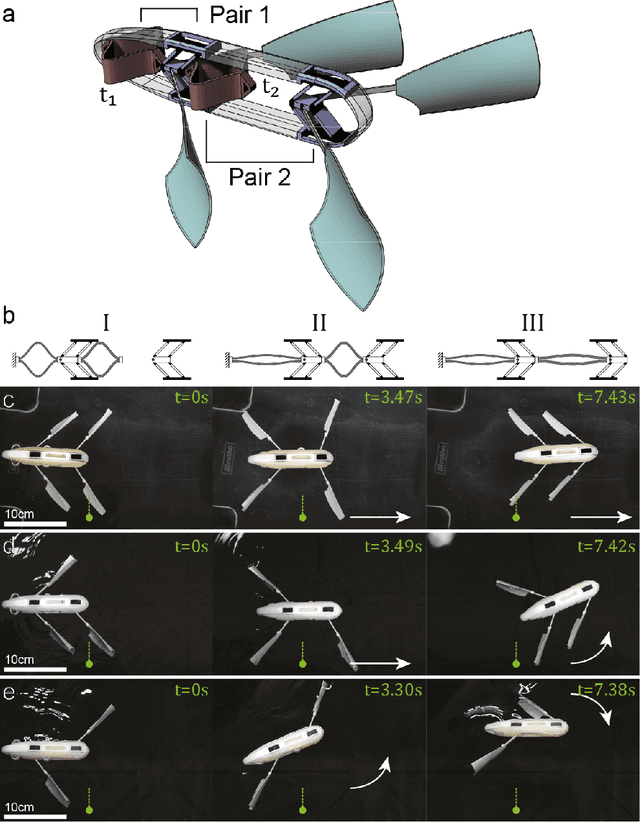
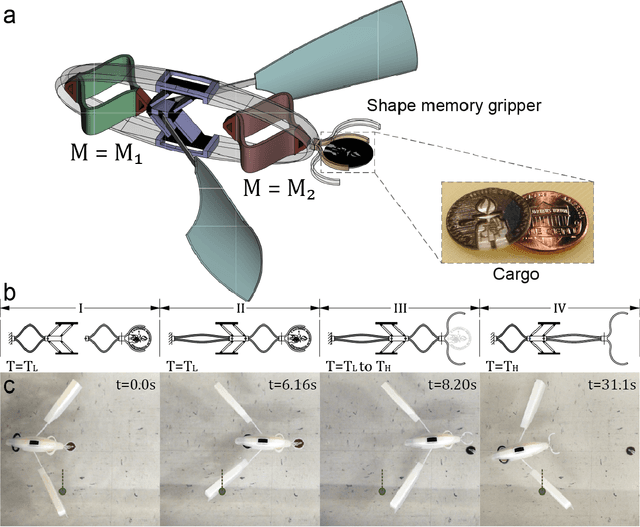
In most macro-scale robotics systems , propulsion and controls are enabled through a physical tether or complex on-board electronics and batteries. A tether simplifies the design process but limits the range of motion of the robot, while on-board controls and power supplies are heavy and complicate the design process. Here we present a simple design principle for an untethered, entirely soft, swimming robot with the ability to achieve preprogrammed, directional propulsion without a battery or on-board electronics. Locomotion is achieved by employing actuators that harness the large displacements of bistable elements, triggered by surrounding temperature changes. Powered by shape memory polymer (SMP) muscles, the bistable elements in turn actuates the robot's fins. Our robots are fabricated entirely using a commercially available 3D printer with no post-processing. As a proof-of-concept, we demonstrate the ability to program a vessel, which can autonomously deliver a cargo and navigate back to the deployment point.