 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAssuring safety of vision-based swarm formation control
Oct 03, 2022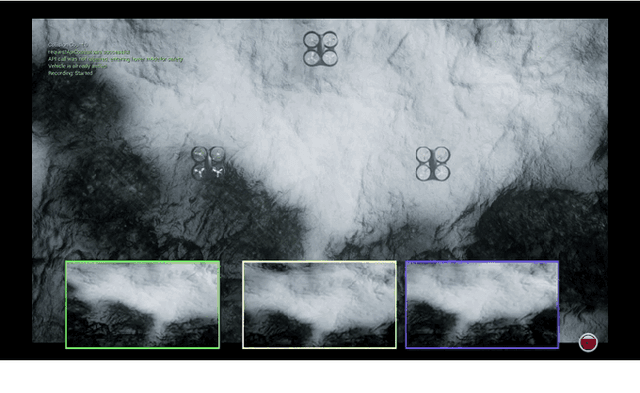
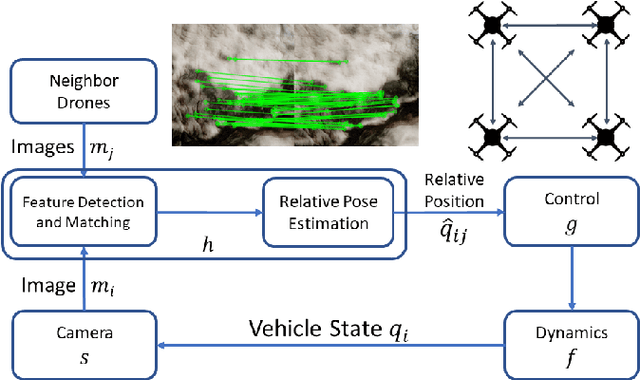
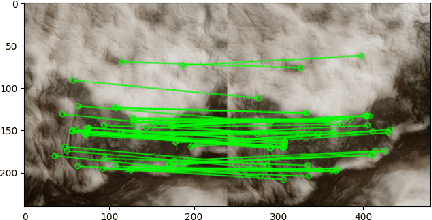
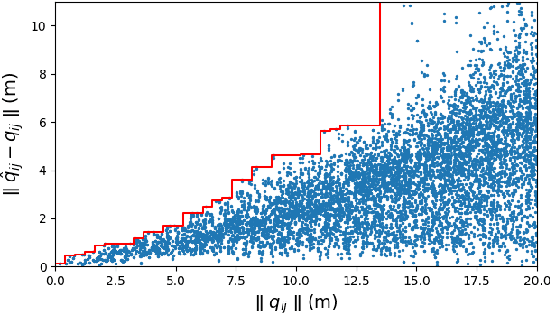
Vision-based formation control systems recently have attracted attentions from both the research community and the industry for its applicability in GPS-denied environments. The safety assurance for such systems is challenging due to the lack of formal specifications for computer vision systems and the complex impact of imprecise estimations on distributed control. We propose a technique for safety assurance of vision-based formation control. Our technique combines (1) the construction of a piecewise approximation of the worst-case error of perception and (2) a classical Lyapunov-based safety analysis of the consensus control algorithm. The analysis provides the ultimate bound on the relative distance between drones. This ultimate bound can then be used to guarantee safe separation of all drones. We implement an instance of the vision-based control system on top of the photo-realistic AirSim simulator. We construct the piecewise approximation for varying perception error under different environments and weather conditions, and we are able to validate the safe separation provided by our analysis across the different weather conditions with AirSim simulation.
Estimating Uncertainty of Autonomous Vehicle Systems with Generalized Polynomial Chaos
Aug 09, 2022
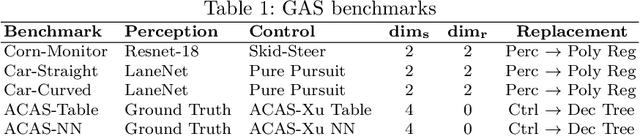
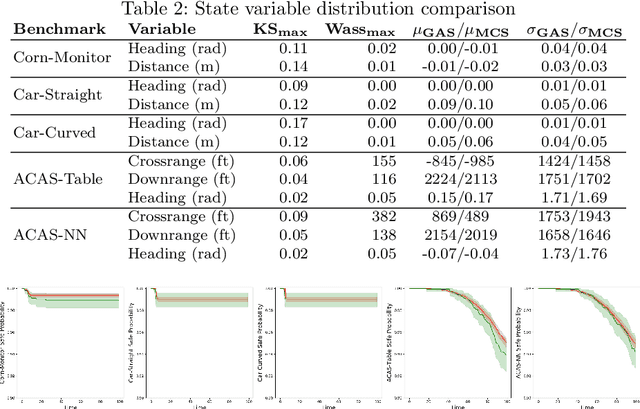
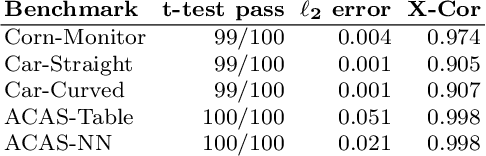
Modern autonomous vehicle systems use complex perception and control components and must cope with uncertain data received from sensors. To estimate the probability that such vehicles remain in a safe state, developers often resort to time-consuming simulation methods. This paper presents an alternative methodology for analyzing autonomy pipelines in vehicular systems, based on Generalized Polynomial Chaos (GPC). We also present GAS, the first algorithm for creating and using GPC models of complex vehicle systems. GAS replaces complex perception components with a perception model to reduce complexity. Then, it constructs the GPC model and uses it for estimating state distribution and/or probability of entering an unsafe state. We evaluate GAS on five scenarios used in crop management vehicles, self driving cars, and aerial drones - each system uses at least one complex perception or control component. We show that GAS calculates state distributions that closely match those produced by Monte Carlo Simulation, while also providing 2.3x-3.0x speedups.
Verifying Controllers with Convolutional Neural Network-based Perception: A Case for Intelligible, Safe, and Precise Abstractions
Nov 10, 2021
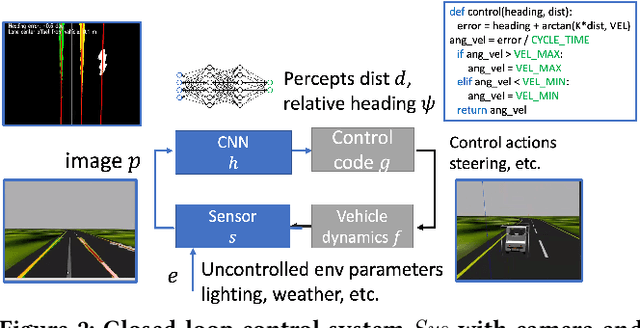
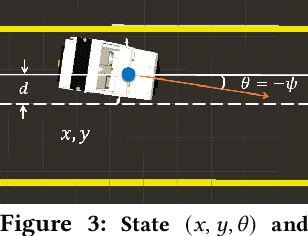
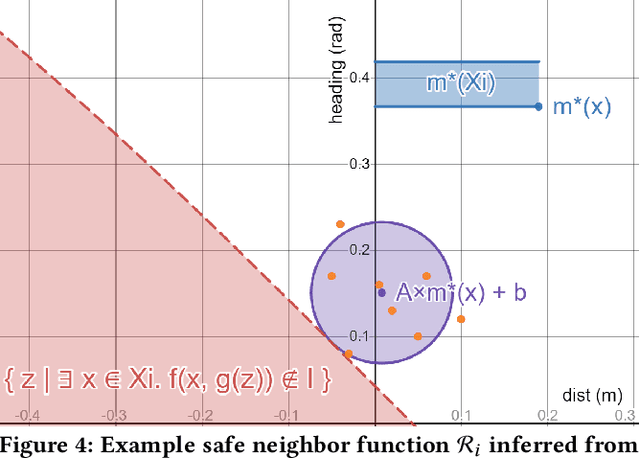
Convolutional Neural Networks (CNN) for object detection, lane detection, and segmentation now sit at the head of most autonomy pipelines, and yet, their safety analysis remains an important challenge. Formal analysis of perception models is fundamentally difficult because their correctness is hard if not impossible to specify. We present a technique for inferring intelligible and safe abstractions for perception models from system-level safety requirements, data, and program analysis of the modules that are downstream from perception. The technique can help tradeoff safety, size, and precision, in creating abstractions and the subsequent verification. We apply the method to two significant case studies based on high-fidelity simulations (a) a vision-based lane keeping controller for an autonomous vehicle and (b) a controller for an agricultural robot. We show how the generated abstractions can be composed with the downstream modules and then the resulting abstract system can be verified using program analysis tools like CBMC. Detailed evaluations of the impacts of size, safety requirements, and the environmental parameters (e.g., lighting, road surface, plant type) on the precision of the generated abstractions suggest that the approach can help guide the search for corner cases and safe operating envelops.
Unmanned air-traffic management (UTM): Formalization, a prototype implementation, and performance evaluation
Sep 10, 2020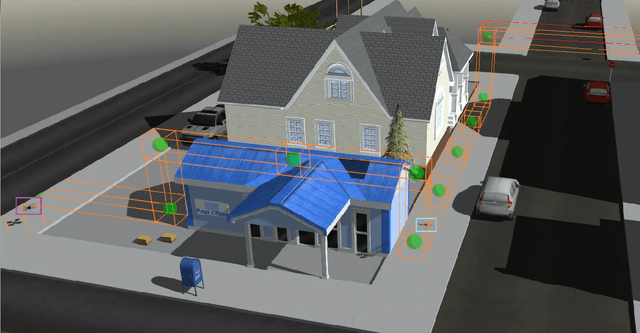
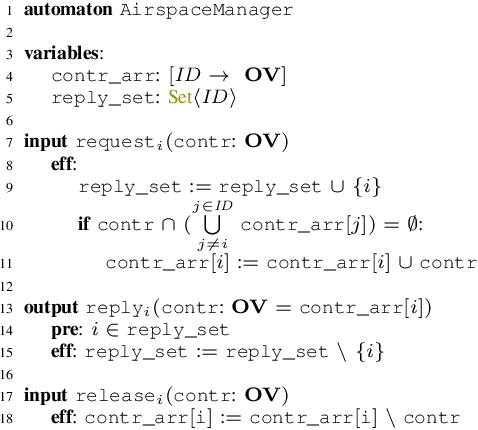
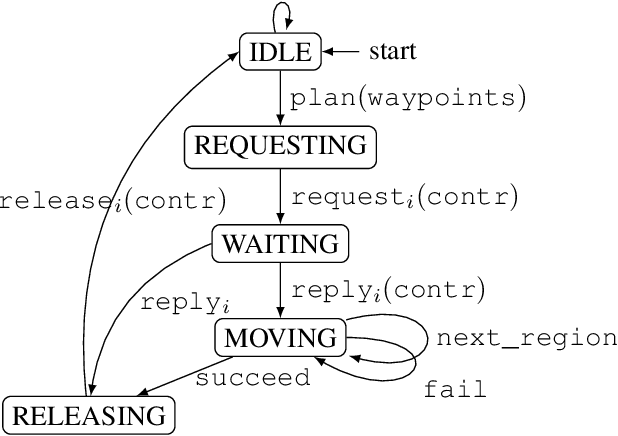
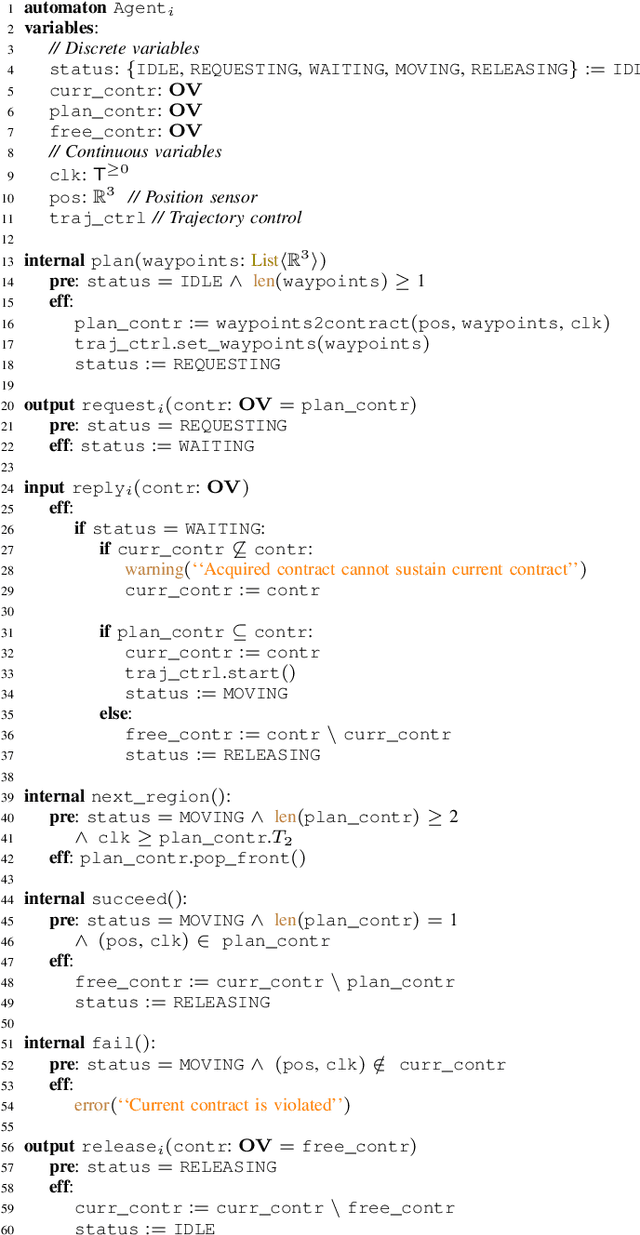
Unmanned Aircraft Systems (UAS) are being increasingly used in delivery, infrastructure surveillance, fire-fighting, and agriculture. According to the Federal Aviation Administration (FAA), the number of active small commercial unmanned aircraft is going to grow from 385K in 2019 to 828K by 2024. UAS traffic management (UTM) system for low-altitude airspace is therefore immediately necessary for its safe and high-density use. In this paper, we propose the first formalization of FAA's Concept of Operations for UTM for building and analyzing traffic management protocols and systems. We formalize FAA's notion of operation volumes (OVs) that express aircraft intent in terms of 4D blocks of airspace and associated real-time deadlines. We present a prototype coordination protocol using OVs, involving participating aircraft and an airspace manager. We formally analyze the safe separation and liveness properties of the protocol. Our analyses showcase how the de-conflicting and liveness of the system can be proven assuming each aircraft conforms to the deadlines specified by OVs. Through extensive simulations, we evaluate the performance of the protocol in terms of workload and response delays. Our experiments show that the workload on the airspace manager and the response time of each aircraft grow linearly with respect to the number of aircraft. The experiments also delineate the trade-off between performance, workload, and violation rate across different strategies for generating OVs. Lastly, we implement a UTM violation detection and resolution mechanism on top of our protocol. We include a simple fault injection technique that introduces failures with different probabilities. We demonstrate how to use it to empirically evaluate the impact of aircraft failure on the safety of surrounding aircraft, and how the performance of the airspace manager changes under different failure probabilities.
CyPhyHouse: A Programming, Simulation, and Deployment Toolchain for Heterogeneous Distributed Coordination
Oct 10, 2019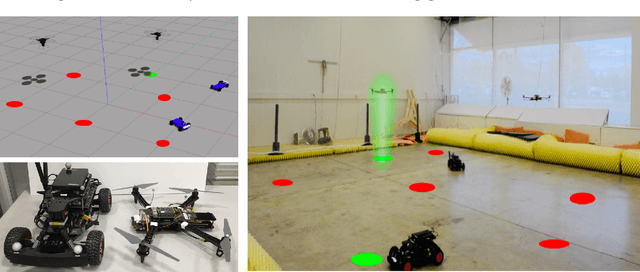
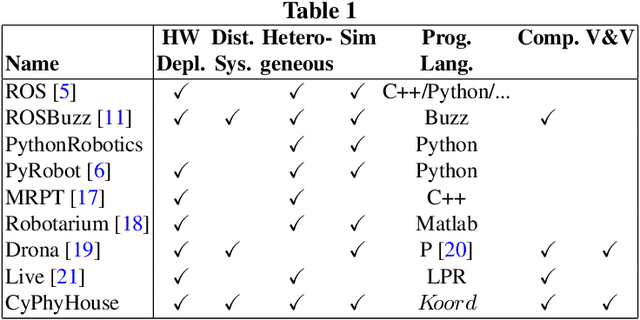
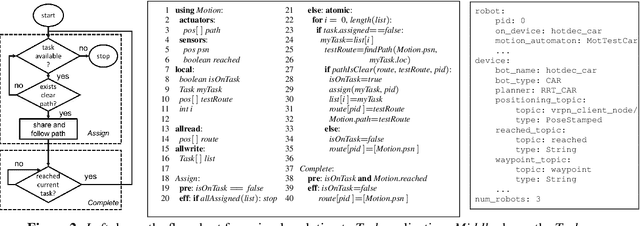
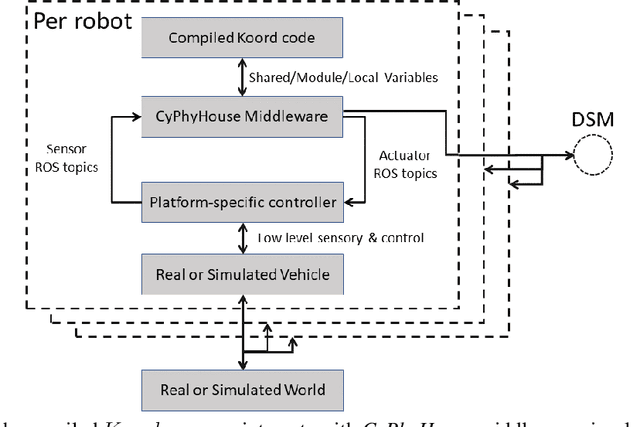
Programming languages, libraries, and development tools have transformed the application development processes for mobile computing and machine learning. This paper introduces the CyPhyHouse - a toolchain that aims to provide similar programming, debugging, and deployment benefits for distributed mobile robotic applications. Users can develop hardware-agnostic, distributed applications using the high-level, event driven Koord programming language, without requiring expertise in controller design or distributed network protocols. The modular, platform-independent middleware of CyPhyHouse implements these functionalities using standard algorithms for path planning (RRT), control (MPC), mutual exclusion, etc. A high-fidelity, scalable, multi-threaded simulator for Koord applications is developed to simulate the same application code for dozens of heterogeneous agents. The same compiled code can also be deployed on heterogeneous mobile platforms. The effectiveness of CyPhyHouse in improving the design cycles is explicitly illustrated in a robotic testbed through development, simulation, and deployment of a distributed task allocation application on in-house ground and aerial vehicles.
PAC Learning-Based Verification and Model Synthesis
Nov 03, 2015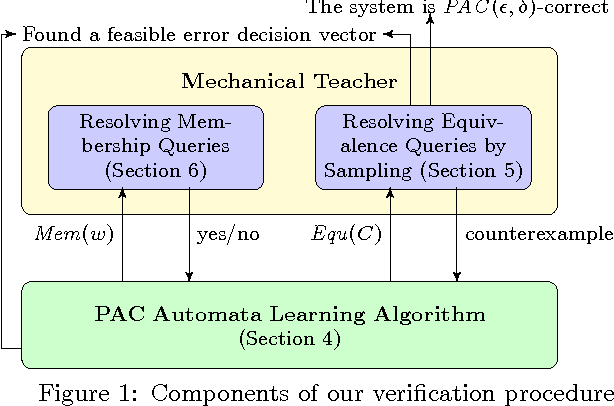
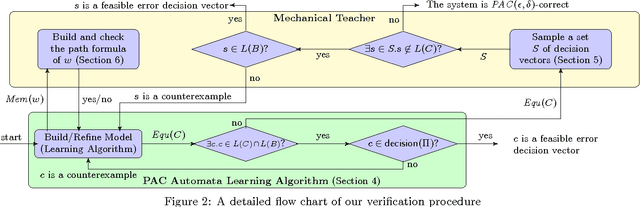
We introduce a novel technique for verification and model synthesis of sequential programs. Our technique is based on learning a regular model of the set of feasible paths in a program, and testing whether this model contains an incorrect behavior. Exact learning algorithms require checking equivalence between the model and the program, which is a difficult problem, in general undecidable. Our learning procedure is therefore based on the framework of probably approximately correct (PAC) learning, which uses sampling instead and provides correctness guarantees expressed using the terms error probability and confidence. Besides the verification result, our procedure also outputs the model with the said correctness guarantees. Obtained preliminary experiments show encouraging results, in some cases even outperforming mature software verifiers.