 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAssuring safety of vision-based swarm formation control
Oct 03, 2022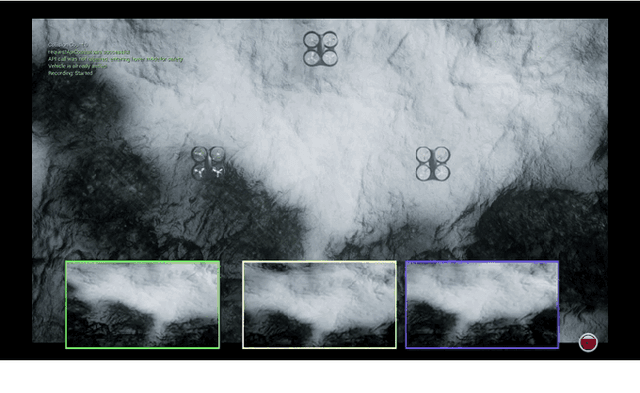
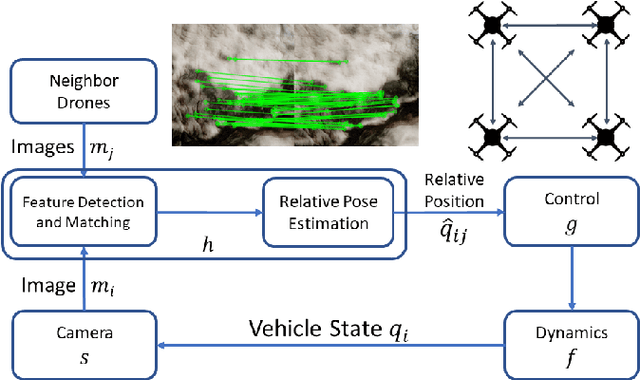
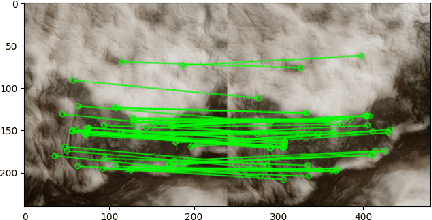
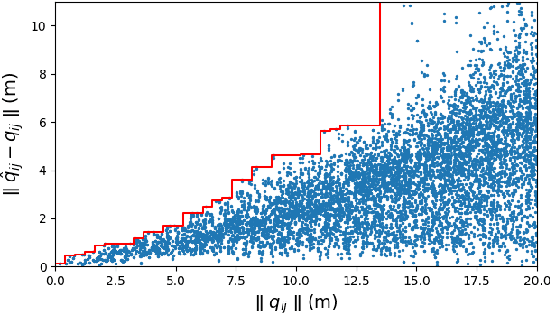
Vision-based formation control systems recently have attracted attentions from both the research community and the industry for its applicability in GPS-denied environments. The safety assurance for such systems is challenging due to the lack of formal specifications for computer vision systems and the complex impact of imprecise estimations on distributed control. We propose a technique for safety assurance of vision-based formation control. Our technique combines (1) the construction of a piecewise approximation of the worst-case error of perception and (2) a classical Lyapunov-based safety analysis of the consensus control algorithm. The analysis provides the ultimate bound on the relative distance between drones. This ultimate bound can then be used to guarantee safe separation of all drones. We implement an instance of the vision-based control system on top of the photo-realistic AirSim simulator. We construct the piecewise approximation for varying perception error under different environments and weather conditions, and we are able to validate the safe separation provided by our analysis across the different weather conditions with AirSim simulation.