 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating Uncertainty of Autonomous Vehicle Systems with Generalized Polynomial Chaos
Aug 09, 2022
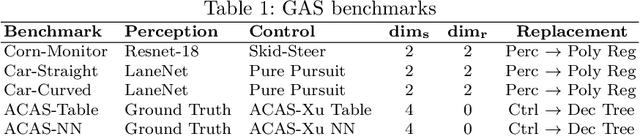
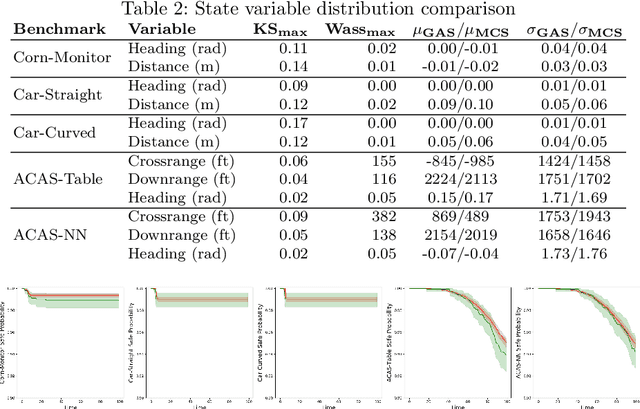
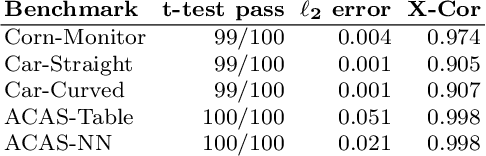
Modern autonomous vehicle systems use complex perception and control components and must cope with uncertain data received from sensors. To estimate the probability that such vehicles remain in a safe state, developers often resort to time-consuming simulation methods. This paper presents an alternative methodology for analyzing autonomy pipelines in vehicular systems, based on Generalized Polynomial Chaos (GPC). We also present GAS, the first algorithm for creating and using GPC models of complex vehicle systems. GAS replaces complex perception components with a perception model to reduce complexity. Then, it constructs the GPC model and uses it for estimating state distribution and/or probability of entering an unsafe state. We evaluate GAS on five scenarios used in crop management vehicles, self driving cars, and aerial drones - each system uses at least one complex perception or control component. We show that GAS calculates state distributions that closely match those produced by Monte Carlo Simulation, while also providing 2.3x-3.0x speedups.
Verifying Controllers with Convolutional Neural Network-based Perception: A Case for Intelligible, Safe, and Precise Abstractions
Nov 10, 2021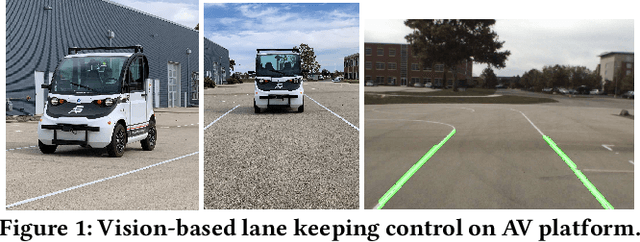
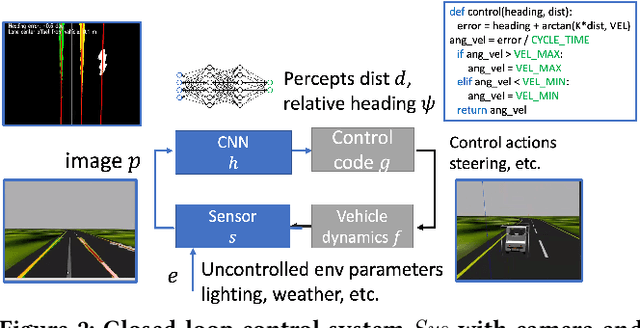
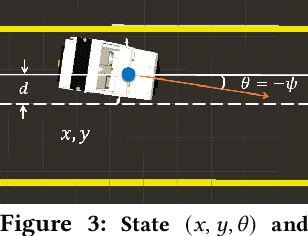
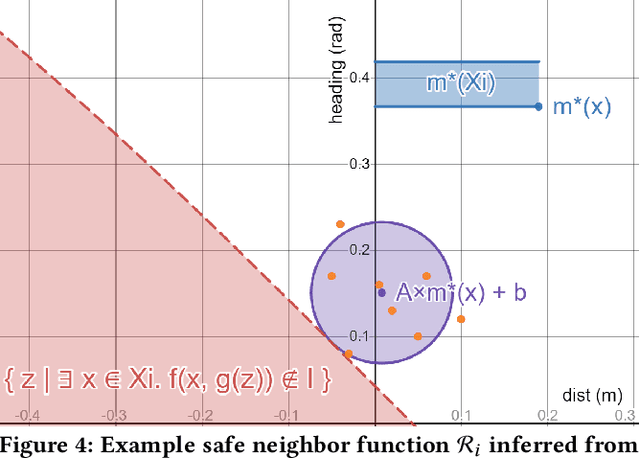
Convolutional Neural Networks (CNN) for object detection, lane detection, and segmentation now sit at the head of most autonomy pipelines, and yet, their safety analysis remains an important challenge. Formal analysis of perception models is fundamentally difficult because their correctness is hard if not impossible to specify. We present a technique for inferring intelligible and safe abstractions for perception models from system-level safety requirements, data, and program analysis of the modules that are downstream from perception. The technique can help tradeoff safety, size, and precision, in creating abstractions and the subsequent verification. We apply the method to two significant case studies based on high-fidelity simulations (a) a vision-based lane keeping controller for an autonomous vehicle and (b) a controller for an agricultural robot. We show how the generated abstractions can be composed with the downstream modules and then the resulting abstract system can be verified using program analysis tools like CBMC. Detailed evaluations of the impacts of size, safety requirements, and the environmental parameters (e.g., lighting, road surface, plant type) on the precision of the generated abstractions suggest that the approach can help guide the search for corner cases and safe operating envelops.