 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnmanned air-traffic management (UTM): Formalization, a prototype implementation, and performance evaluation
Paper and Code
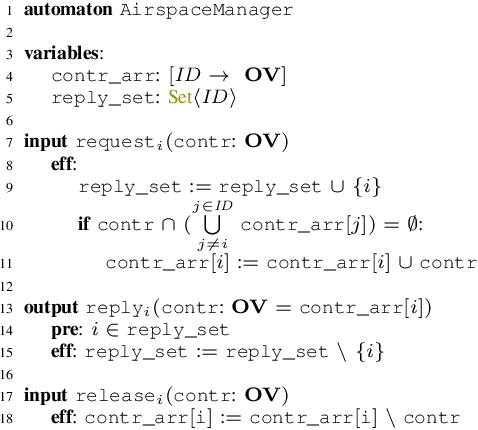
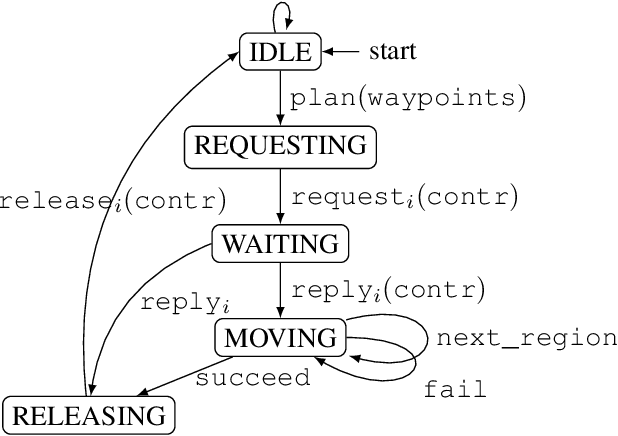
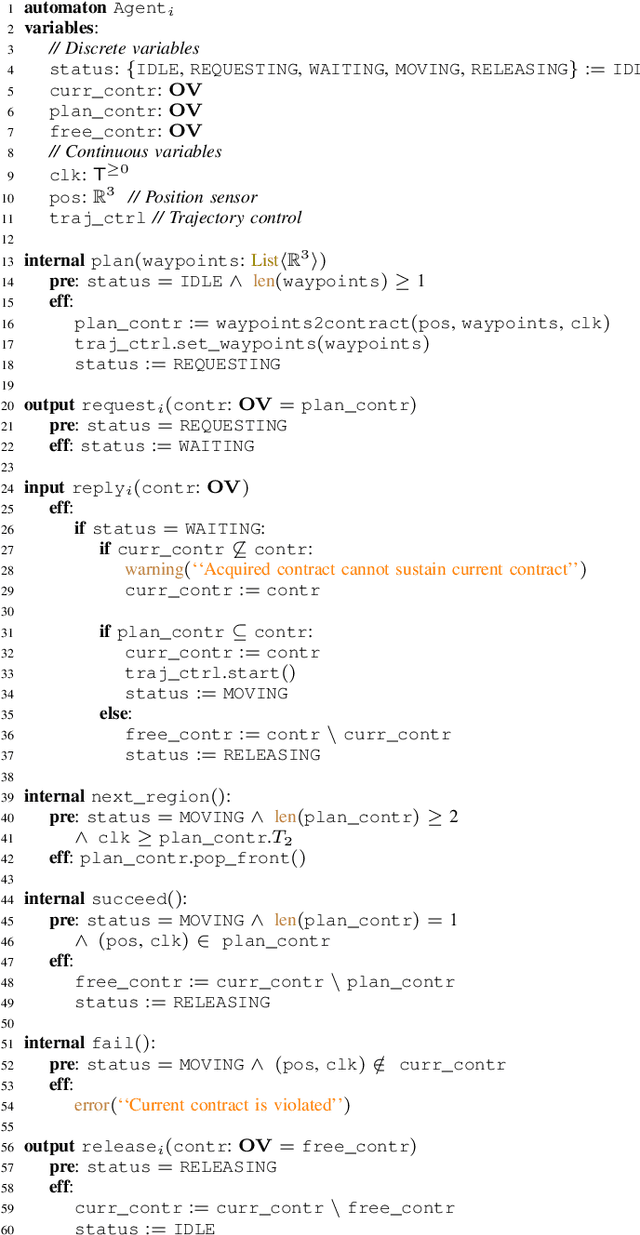
Unmanned Aircraft Systems (UAS) are being increasingly used in delivery, infrastructure surveillance, fire-fighting, and agriculture. According to the Federal Aviation Administration (FAA), the number of active small commercial unmanned aircraft is going to grow from 385K in 2019 to 828K by 2024. UAS traffic management (UTM) system for low-altitude airspace is therefore immediately necessary for its safe and high-density use. In this paper, we propose the first formalization of FAA's Concept of Operations for UTM for building and analyzing traffic management protocols and systems. We formalize FAA's notion of operation volumes (OVs) that express aircraft intent in terms of 4D blocks of airspace and associated real-time deadlines. We present a prototype coordination protocol using OVs, involving participating aircraft and an airspace manager. We formally analyze the safe separation and liveness properties of the protocol. Our analyses showcase how the de-conflicting and liveness of the system can be proven assuming each aircraft conforms to the deadlines specified by OVs. Through extensive simulations, we evaluate the performance of the protocol in terms of workload and response delays. Our experiments show that the workload on the airspace manager and the response time of each aircraft grow linearly with respect to the number of aircraft. The experiments also delineate the trade-off between performance, workload, and violation rate across different strategies for generating OVs. Lastly, we implement a UTM violation detection and resolution mechanism on top of our protocol. We include a simple fault injection technique that introduces failures with different probabilities. We demonstrate how to use it to empirically evaluate the impact of aircraft failure on the safety of surrounding aircraft, and how the performance of the airspace manager changes under different failure probabilities.