 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpotNet: An Image Centric, Lidar Anchored Approach To Long Range Perception
May 24, 2024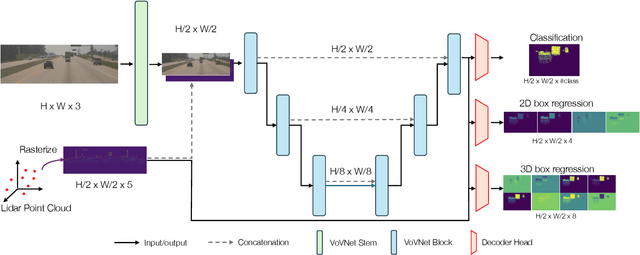

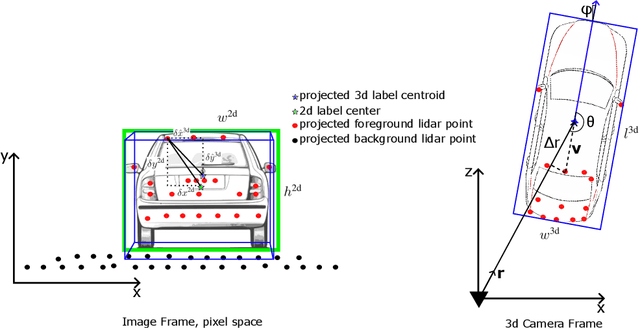
In this paper, we propose SpotNet: a fast, single stage, image-centric but LiDAR anchored approach for long range 3D object detection. We demonstrate that our approach to LiDAR/image sensor fusion, combined with the joint learning of 2D and 3D detection tasks, can lead to accurate 3D object detection with very sparse LiDAR support. Unlike more recent bird's-eye-view (BEV) sensor-fusion methods which scale with range $r$ as $O(r^2)$, SpotNet scales as $O(1)$ with range. We argue that such an architecture is ideally suited to leverage each sensor's strength, i.e. semantic understanding from images and accurate range finding from LiDAR data. Finally we show that anchoring detections on LiDAR points removes the need to regress distances, and so the architecture is able to transfer from 2MP to 8MP resolution images without re-training.
Non-Local Spatial Propagation Network for Depth Completion
Jul 20, 2020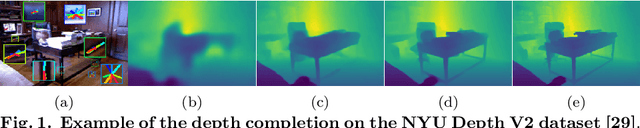
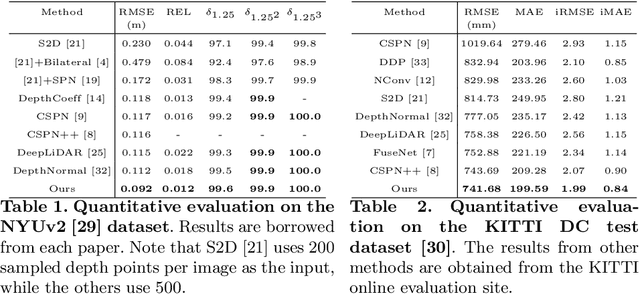
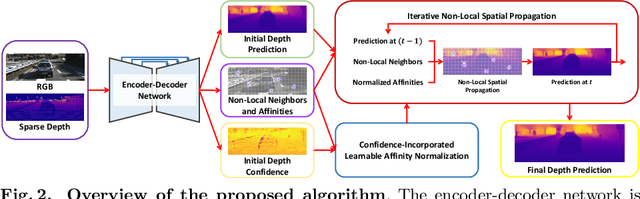
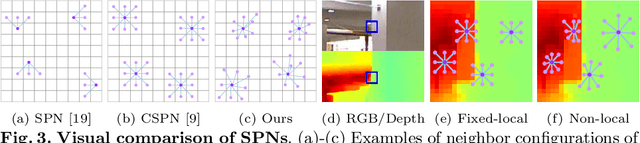
In this paper, we propose a robust and efficient end-to-end non-local spatial propagation network for depth completion. The proposed network takes RGB and sparse depth images as inputs and estimates non-local neighbors and their affinities of each pixel, as well as an initial depth map with pixel-wise confidences. The initial depth prediction is then iteratively refined by its confidence and non-local spatial propagation procedure based on the predicted non-local neighbors and corresponding affinities. Unlike previous algorithms that utilize fixed-local neighbors, the proposed algorithm effectively avoids irrelevant local neighbors and concentrates on relevant non-local neighbors during propagation. In addition, we introduce a learnable affinity normalization to better learn the affinity combinations compared to conventional methods. The proposed algorithm is inherently robust to the mixed-depth problem on depth boundaries, which is one of the major issues for existing depth estimation/completion algorithms. Experimental results on indoor and outdoor datasets demonstrate that the proposed algorithm is superior to conventional algorithms in terms of depth completion accuracy and robustness to the mixed-depth problem. Our implementation is publicly available on the project page.