 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActiveGlasses: Learning Manipulation with Active Vision from Ego-centric Human Demonstration
Apr 09, 2026Large-scale real-world robot data collection is a prerequisite for bringing robots into everyday deployment. However, existing pipelines often rely on specialized handheld devices to bridge the embodiment gap, which not only increases operator burden and limits scalability, but also makes it difficult to capture the naturally coordinated perception-manipulation behaviors of human daily interaction. This challenge calls for a more natural system that can faithfully capture human manipulation and perception behaviors while enabling zero-shot transfer to robotic platforms. We introduce ActiveGlasses, a system for learning robot manipulation from ego-centric human demonstrations with active vision. A stereo camera mounted on smart glasses serves as the sole perception device for both data collection and policy inference: the operator wears it during bare-hand demonstrations, and the same camera is mounted on a 6-DoF perception arm during deployment to reproduce human active vision. To enable zero-transfer, we extract object trajectories from demonstrations and use an object-centric point-cloud policy to jointly predict manipulation and head movement. Across several challenging tasks involving occlusion and precise interaction, ActiveGlasses achieves zero-shot transfer with active vision, consistently outperforms strong baselines under the same hardware setup, and generalizes across two robot platforms.
EGS-SLAM: RGB-D Gaussian Splatting SLAM with Events
Aug 09, 2025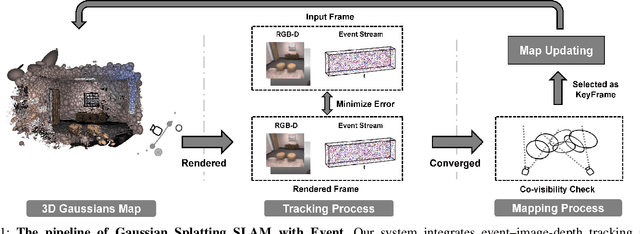
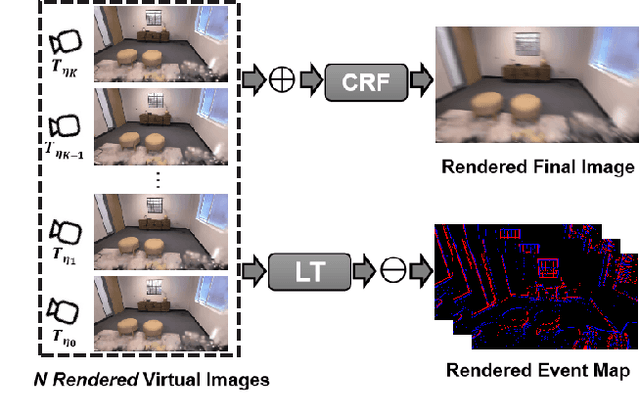
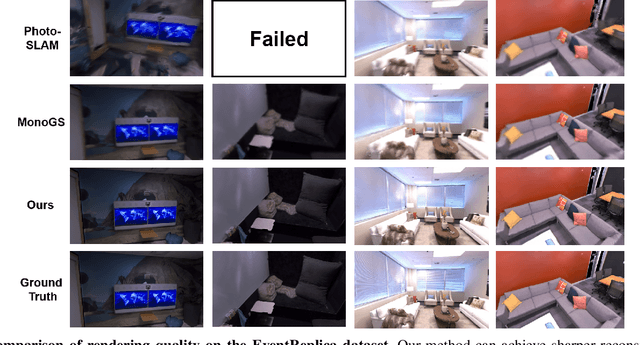

Gaussian Splatting SLAM (GS-SLAM) offers a notable improvement over traditional SLAM methods, enabling photorealistic 3D reconstruction that conventional approaches often struggle to achieve. However, existing GS-SLAM systems perform poorly under persistent and severe motion blur commonly encountered in real-world scenarios, leading to significantly degraded tracking accuracy and compromised 3D reconstruction quality. To address this limitation, we propose EGS-SLAM, a novel GS-SLAM framework that fuses event data with RGB-D inputs to simultaneously reduce motion blur in images and compensate for the sparse and discrete nature of event streams, enabling robust tracking and high-fidelity 3D Gaussian Splatting reconstruction. Specifically, our system explicitly models the camera's continuous trajectory during exposure, supporting event- and blur-aware tracking and mapping on a unified 3D Gaussian Splatting scene. Furthermore, we introduce a learnable camera response function to align the dynamic ranges of events and images, along with a no-event loss to suppress ringing artifacts during reconstruction. We validate our approach on a new dataset comprising synthetic and real-world sequences with significant motion blur. Extensive experimental results demonstrate that EGS-SLAM consistently outperforms existing GS-SLAM systems in both trajectory accuracy and photorealistic 3D Gaussian Splatting reconstruction. The source code will be available at https://github.com/Chensiyu00/EGS-SLAM.
A Label-Free and Non-Monotonic Metric for Evaluating Denoising in Event Cameras
Jun 13, 2024
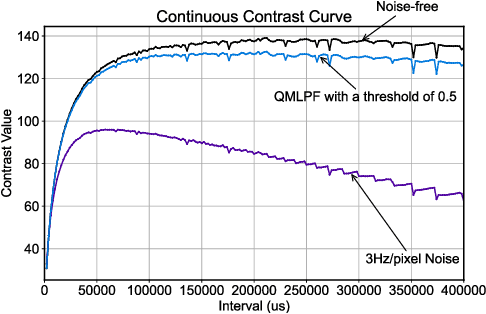
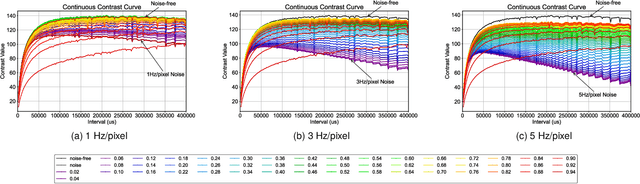
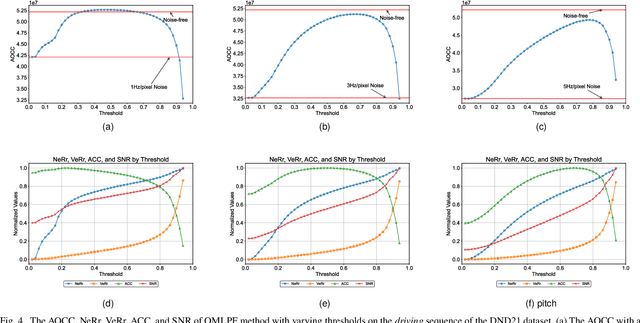
Event cameras are renowned for their high efficiency due to outputting a sparse, asynchronous stream of events. However, they are plagued by noisy events, especially in low light conditions. Denoising is an essential task for event cameras, but evaluating denoising performance is challenging. Label-dependent denoising metrics involve artificially adding noise to clean sequences, complicating evaluations. Moreover, the majority of these metrics are monotonic, which can inflate scores by removing substantial noise and valid events. To overcome these limitations, we propose the first label-free and non-monotonic evaluation metric, the area of the continuous contrast curve (AOCC), which utilizes the area enclosed by event frame contrast curves across different time intervals. This metric is inspired by how events capture the edge contours of scenes or objects with high temporal resolution. An effective denoising method removes noise without eliminating these edge-contour events, thus preserving the contrast of event frames. Consequently, contrast across various time ranges serves as a metric to assess denoising effectiveness. As the time interval lengthens, the curve will initially rise and then fall. The proposed metric is validated through both theoretical and experimental evidence.
IDO-VFI: Identifying Dynamics via Optical Flow Guidance for Video Frame Interpolation with Events
May 18, 2023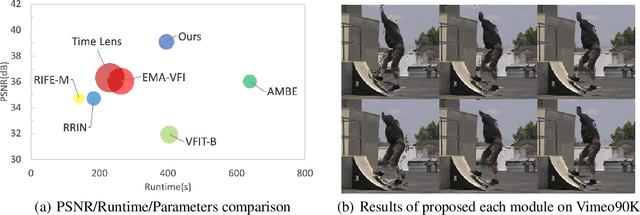
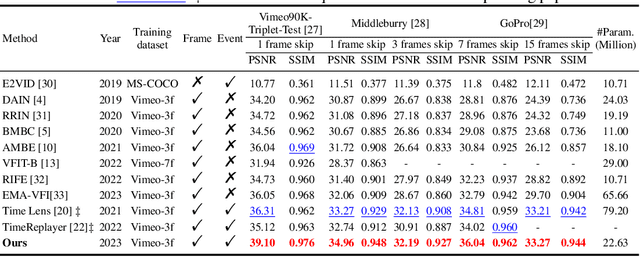
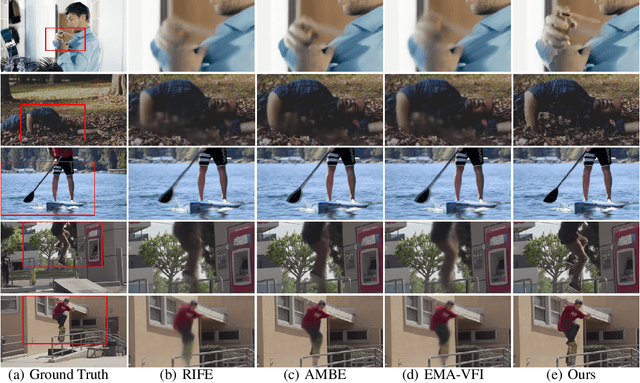
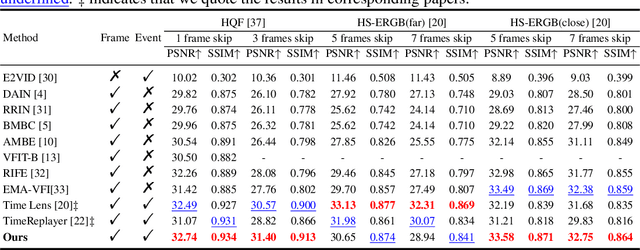
Video frame interpolation aims to generate high-quality intermediate frames from boundary frames and increase frame rate. While existing linear, symmetric and nonlinear models are used to bridge the gap from the lack of inter-frame motion, they cannot reconstruct real motions. Event cameras, however, are ideal for capturing inter-frame dynamics with their extremely high temporal resolution. In this paper, we propose an event-and-frame-based video frame interpolation method named IDO-VFI that assigns varying amounts of computation for different sub-regions via optical flow guidance. The proposed method first estimates the optical flow based on frames and events, and then decides whether to further calculate the residual optical flow in those sub-regions via a Gumbel gating module according to the optical flow amplitude. Intermediate frames are eventually generated through a concise Transformer-based fusion network. Our proposed method maintains high-quality performance while reducing computation time and computational effort by 10% and 17% respectively on Vimeo90K datasets, compared with a unified process on the whole region. Moreover, our method outperforms state-of-the-art frame-only and frames-plus-events methods on multiple video frame interpolation benchmarks. Codes and models are available at https://github.com/shicy17/IDO-VFI.