 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePose-Oriented Transformer with Uncertainty-Guided Refinement for 2D-to-3D Human Pose Estimation
Feb 15, 2023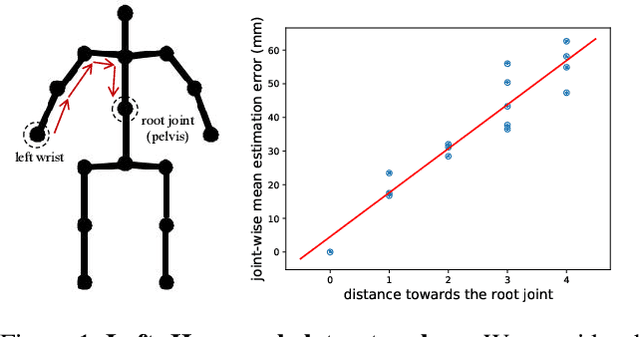



There has been a recent surge of interest in introducing transformers to 3D human pose estimation (HPE) due to their powerful capabilities in modeling long-term dependencies. However, existing transformer-based methods treat body joints as equally important inputs and ignore the prior knowledge of human skeleton topology in the self-attention mechanism. To tackle this issue, in this paper, we propose a Pose-Oriented Transformer (POT) with uncertainty guided refinement for 3D HPE. Specifically, we first develop novel pose-oriented self-attention mechanism and distance-related position embedding for POT to explicitly exploit the human skeleton topology. The pose-oriented self-attention mechanism explicitly models the topological interactions between body joints, whereas the distance-related position embedding encodes the distance of joints to the root joint to distinguish groups of joints with different difficulties in regression. Furthermore, we present an Uncertainty-Guided Refinement Network (UGRN) to refine pose predictions from POT, especially for the difficult joints, by considering the estimated uncertainty of each joint with uncertainty-guided sampling strategy and self-attention mechanism. Extensive experiments demonstrate that our method significantly outperforms the state-of-the-art methods with reduced model parameters on 3D HPE benchmarks such as Human3.6M and MPI-INF-3DHP
Hierarchical Graph Networks for 3D Human Pose Estimation
Nov 23, 2021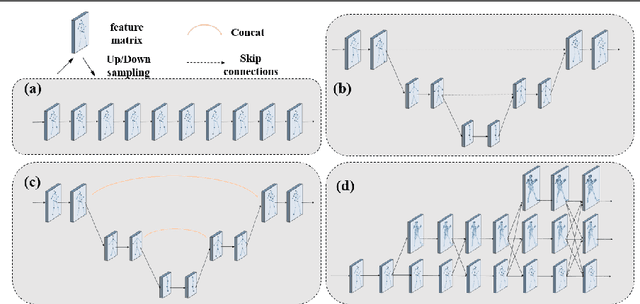

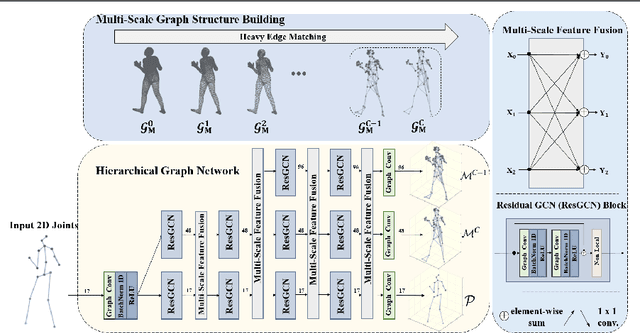
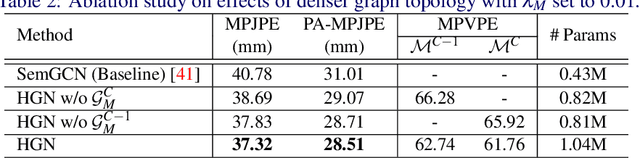
Recent 2D-to-3D human pose estimation works tend to utilize the graph structure formed by the topology of the human skeleton. However, we argue that this skeletal topology is too sparse to reflect the body structure and suffer from serious 2D-to-3D ambiguity problem. To overcome these weaknesses, we propose a novel graph convolution network architecture, Hierarchical Graph Networks (HGN). It is based on denser graph topology generated by our multi-scale graph structure building strategy, thus providing more delicate geometric information. The proposed architecture contains three sparse-to-fine representation subnetworks organized in parallel, in which multi-scale graph-structured features are processed and exchange information through a novel feature fusion strategy, leading to rich hierarchical representations. We also introduce a 3D coarse mesh constraint to further boost detail-related feature learning. Extensive experiments demonstrate that our HGN achieves the state-of-the art performance with reduced network parameters