 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpretable Motion Planner for Urban Driving via Hierarchical Imitation Learning
Mar 24, 2023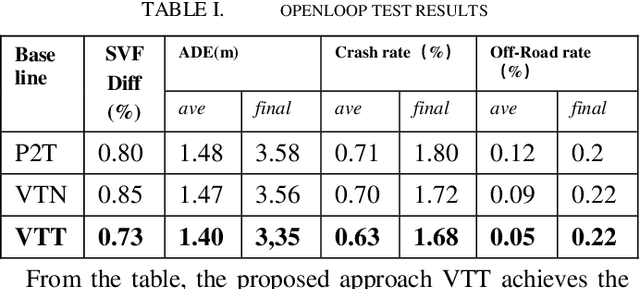
Learning-based approaches have achieved impressive performance for autonomous driving and an increasing number of data-driven works are being studied in the decision-making and planning module. However, the reliability and the stability of the neural network is still full of challenges. In this paper, we introduce a hierarchical imitation method including a high-level grid-based behavior planner and a low-level trajectory planner, which is not only an individual data-driven driving policy and can also be easily embedded into the rule-based architecture. We evaluate our method both in closed-loop simulation and real world driving, and demonstrate the neural network planner has outstanding performance in complex urban autonomous driving scenarios.
A Graph Traversal Based Approach to Answer Non-Aggregation Questions Over DBpedia
Aug 16, 2018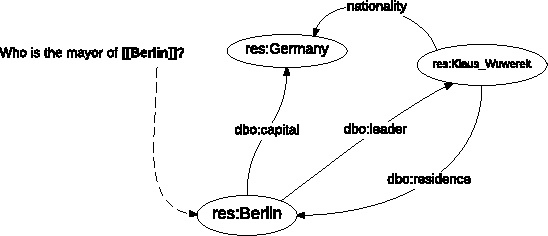
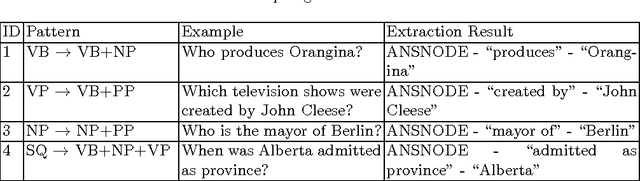
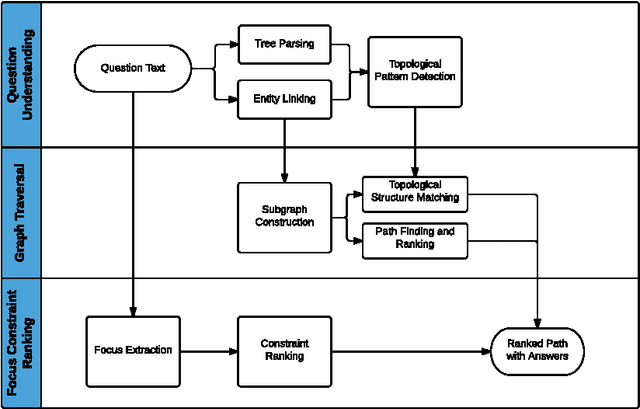

We present a question answering system over DBpedia, filling the gap between user information needs expressed in natural language and a structured query interface expressed in SPARQL over the underlying knowledge base (KB). Given the KB, our goal is to comprehend a natural language query and provide corresponding accurate answers. Focusing on solving the non-aggregation questions, in this paper, we construct a subgraph of the knowledge base from the detected entities and propose a graph traversal method to solve both the semantic item mapping problem and the disambiguation problem in a joint way. Compared with existing work, we simplify the process of query intention understanding and pay more attention to the answer path ranking. We evaluate our method on a non-aggregation question dataset and further on a complete dataset. Experimental results show that our method achieves best performance compared with several state-of-the-art systems.