 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompression of GPS Trajectories using Autoencoders
Jan 18, 2023



The ubiquitous availability of mobile devices capable of location tracking led to a significant rise in the collection of GPS data. Several compression methods have been developed in order to reduce the amount of storage needed while keeping the important information. In this paper, we present an lstm-autoencoder based approach in order to compress and reconstruct GPS trajectories, which is evaluated on both a gaming and real-world dataset. We consider various compression ratios and trajectory lengths. The performance is compared to other trajectory compression algorithms, i.e., Douglas-Peucker. Overall, the results indicate that our approach outperforms Douglas-Peucker significantly in terms of the discrete Fr\'echet distance and dynamic time warping. Furthermore, by reconstructing every point lossy, the proposed methodology offers multiple advantages over traditional methods.
Predictive Collision Management for Time and Risk Dependent Path Planning
Nov 26, 2020

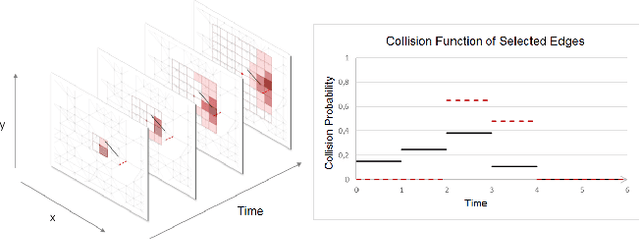
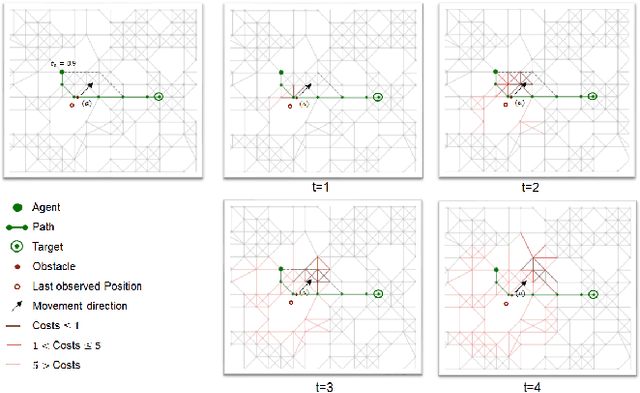
Autonomous agents such as self-driving cars or parcel robots need to recognize and avoid possible collisions with obstacles in order to move successfully in their environment. Humans, however, have learned to predict movements intuitively and to avoid obstacles in a forward-looking way. The task of collision avoidance can be divided into a global and a local level. Regarding the global level, we propose an approach called "Predictive Collision Management Path Planning" (PCMP). At the local level, solutions for collision avoidance are used that prevent an inevitable collision. Therefore, the aim of PCMP is to avoid unnecessary local collision scenarios using predictive collision management. PCMP is a graph-based algorithm with a focus on the time dimension consisting of three parts: (1) movement prediction, (2) integration of movement prediction into a time-dependent graph, and (3) time and risk-dependent path planning. The algorithm combines the search for a shortest path with the question: is the detour worth avoiding a possible collision scenario? We evaluate the evasion behavior in different simulation scenarios and the results show that a risk-sensitive agent can avoid 47.3% of the collision scenarios while making a detour of 1.3%. A risk-averse agent avoids up to 97.3% of the collision scenarios with a detour of 39.1%. Thus, an agent's evasive behavior can be controlled actively and risk-dependent using PCMP.
* Extended version of the SIGSPATIAL '20 paper
A Flexible Pipeline for the Optimization of CSG Trees
Sep 12, 2020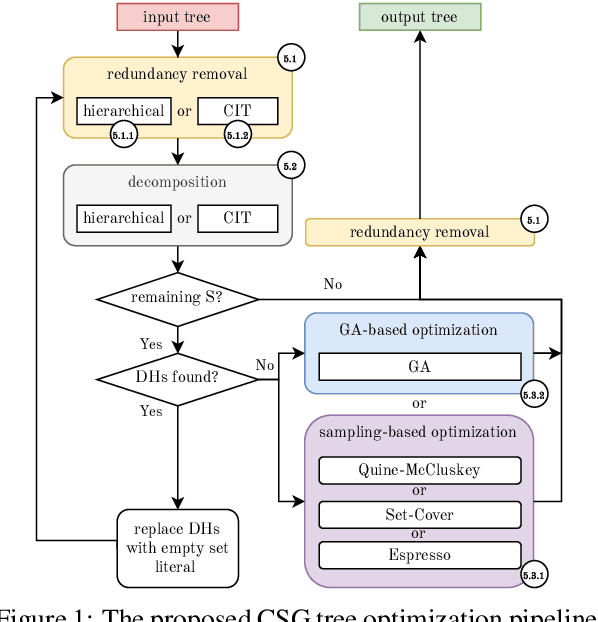
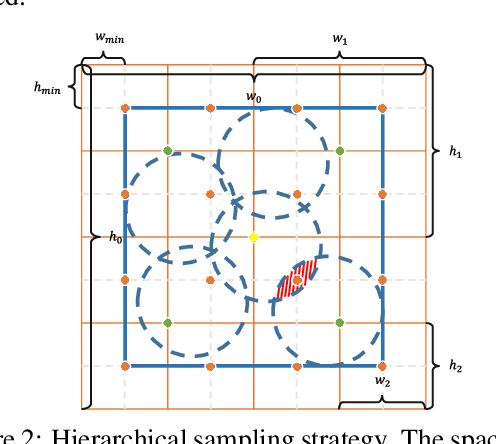
CSG trees are an intuitive, yet powerful technique for the representation of geometry using a combination of Boolean set-operations and geometric primitives. In general, there exists an infinite number of trees all describing the same 3D solid. However, some trees are optimal regarding the number of used operations, their shape or other attributes, like their suitability for intuitive, human-controlled editing. In this paper, we present a systematic comparison of newly developed and existing tree optimization methods and propose a flexible processing pipeline with a focus on tree editability. The pipeline uses a redundancy removal and decomposition stage for complexity reduction and different (meta-)heuristics for remaining tree optimization. We also introduce a new quantitative measure for CSG tree editability and show how it can be used as a constraint in the optimization process.
Emergent Escape-based Flocking Behavior using Multi-Agent Reinforcement Learning
May 10, 2019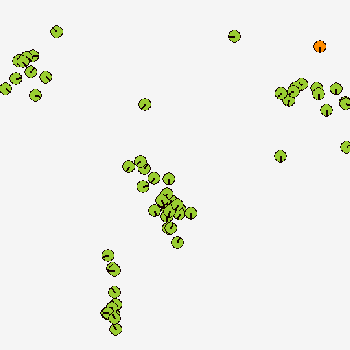
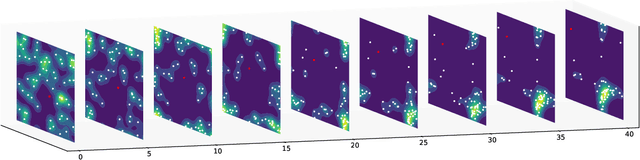
In nature, flocking or swarm behavior is observed in many species as it has beneficial properties like reducing the probability of being caught by a predator. In this paper, we propose SELFish (Swarm Emergent Learning Fish), an approach with multiple autonomous agents which can freely move in a continuous space with the objective to avoid being caught by a present predator. The predator has the property that it might get distracted by multiple possible preys in its vicinity. We show that this property in interaction with self-interested agents which are trained with reinforcement learning to solely survive as long as possible leads to flocking behavior similar to Boids, a common simulation for flocking behavior. Furthermore we present interesting insights in the swarming behavior and in the process of agents being caught in our modeled environment.