 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConvolutional module for heart localization and segmentation in MRI
Jul 19, 2021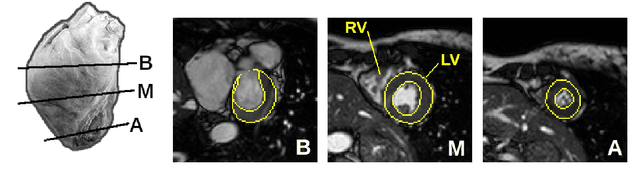
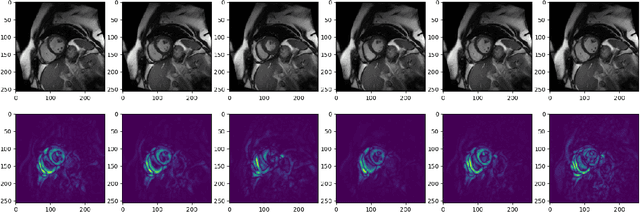
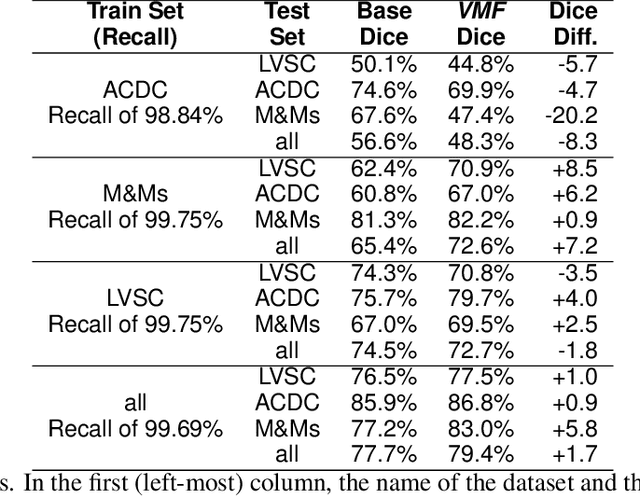
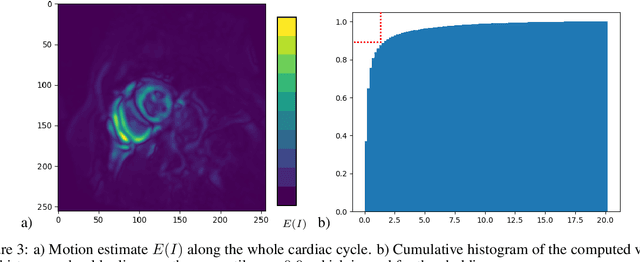
Magnetic resonance imaging (MRI) is a widely known medical imaging technique used to assess the heart function. Deep learning (DL) models perform several tasks in cardiac MRI (CMR) images with good efficacy, such as segmentation, estimation, and detection of diseases. Many DL models based on convolutional neural networks (CNN) were improved by detecting regions-of-interest (ROI) either automatically or by hand. In this paper we describe Visual-Motion-Focus (VMF), a module that detects the heart motion in the 4D MRI sequence, and highlights ROIs by focusing a Radial Basis Function (RBF) on the estimated motion field. We experimented and evaluated VMF on three CMR datasets, observing that the proposed ROIs cover 99.7% of data labels (Recall score), improved the CNN segmentation (mean Dice score) by 1.7 (p < .001) after the ROI extraction, and improved the overall training speed by 2.5 times (+150%).
Continuous Control with Deep Reinforcement Learning for Autonomous Vessels
Jun 27, 2021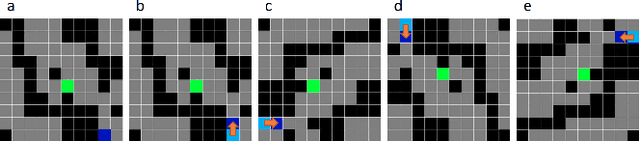
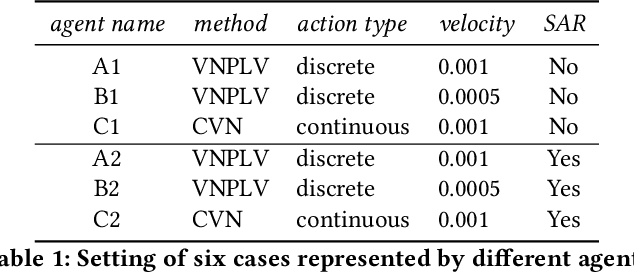
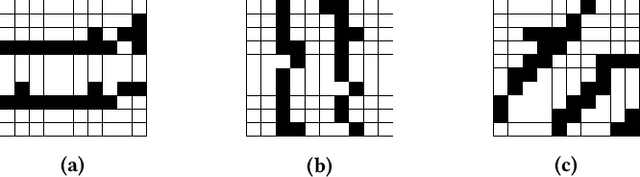
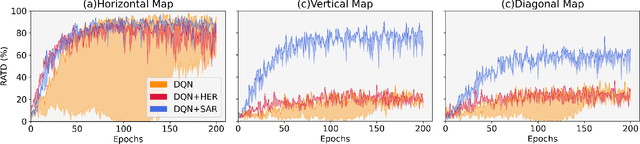
Maritime autonomous transportation has played a crucial role in the globalization of the world economy. Deep Reinforcement Learning (DRL) has been applied to automatic path planning to simulate vessel collision avoidance situations in open seas. End-to-end approaches that learn complex mappings directly from the input have poor generalization to reach the targets in different environments. In this work, we present a new strategy called state-action rotation to improve agent's performance in unseen situations by rotating the obtained experience (state-action-state) and preserving them in the replay buffer. We designed our model based on Deep Deterministic Policy Gradient, local view maker, and planner. Our agent uses two deep Convolutional Neural Networks to estimate the policy and action-value functions. The proposed model was exhaustively trained and tested in maritime scenarios with real maps from cities such as Montreal and Halifax. Experimental results show that the state-action rotation on top of the CVN consistently improves the rate of arrival to a destination (RATD) by up 11.96% with respect to the Vessel Navigator with Planner and Local View (VNPLV), as well as it achieves superior performance in unseen mappings by up 30.82%. Our proposed approach exhibits advantages in terms of robustness when tested in a new environment, supporting the idea that generalization can be achieved by using state-action rotation.
DropLeaf: a precision farming smartphone application for measuring pesticide spraying methods
Aug 31, 2020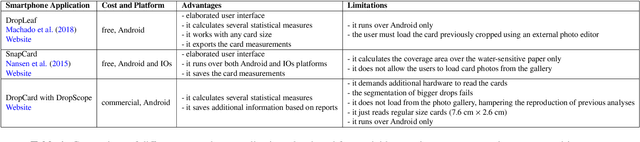
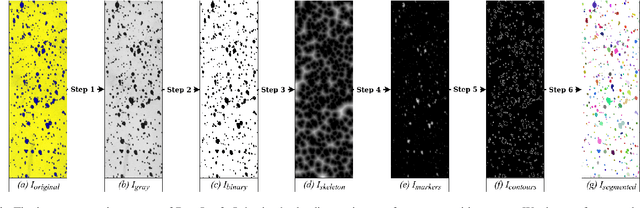
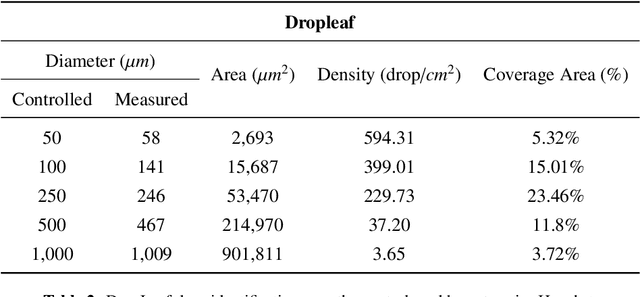

Pesticide application has been heavily used in the cultivation of major crops, contributing to the increase of crop production over the past decades. However, their appropriate use and calibration of machines rely upon evaluation methodologies that can precisely estimate how well the pesticides' spraying covered the crops. A few strategies have been proposed in former works, yet their elevated costs and low portability do not permit their wide adoption. This work introduces and experimentally assesses a novel tool that functions over a smartphone-based mobile application, named DropLeaf - Spraying Meter. Tests performed using DropLeaf demonstrated that, notwithstanding its versatility, it can estimate the pesticide spraying with high precision. Our methodology is based on image analysis, and the assessment of spraying deposition measures is performed successfully over real and synthetic water-sensitive papers. The proposed tool can be extensively used by farmers and agronomists furnished with regular smartphones, improving the utilization of pesticides with well-being, ecological, and monetary advantages. DropLeaf can be easily used for spray drift assessment of different methods, including emerging UAV (Unmanned Aerial Vehicle) sprayers.
Pay Attention to Evolution: Time Series Forecasting with Deep Graph-Evolution Learning
Aug 28, 2020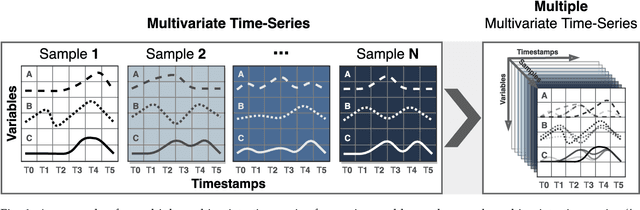
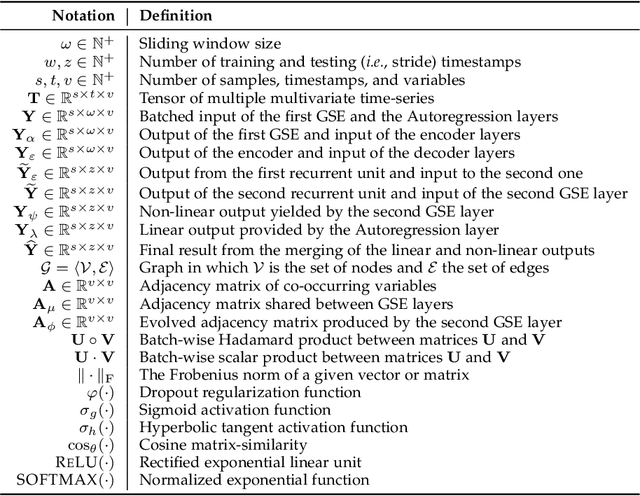
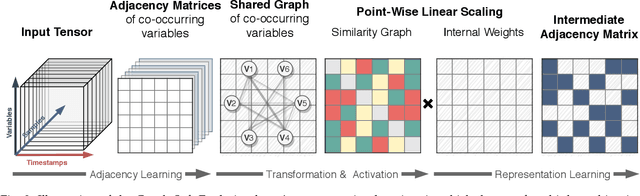

Time-series forecasting is one of the most active research topics in predictive analysis. A still open gap in that literature is that statistical and ensemble learning approaches systematically present lower predictive performance than deep learning methods as they generally disregard the data sequence aspect entangled with multivariate data represented in more than one time series. Conversely, this work presents a novel neural network architecture for time-series forecasting that combines the power of graph evolution with deep recurrent learning on distinct data distributions; we named our method Recurrent Graph Evolution Neural Network (ReGENN). The idea is to infer multiple multivariate relationships between co-occurring time-series by assuming that the temporal data depends not only on inner variables and intra-temporal relationships (i.e., observations from itself) but also on outer variables and inter-temporal relationships (i.e., observations from other-selves). An extensive set of experiments was conducted comparing ReGENN with dozens of ensemble methods and classical statistical ones, showing sound improvement of up to 64.87% over the competing algorithms. Furthermore, we present an analysis of the intermediate weights arising from ReGENN, showing that by looking at inter and intra-temporal relationships simultaneously, time-series forecasting is majorly improved if paying attention to how multiple multivariate data synchronously evolve.
Challenges in Vessel Behavior and Anomaly Detection: From Classical Machine Learning to Deep Learning
Apr 07, 2020
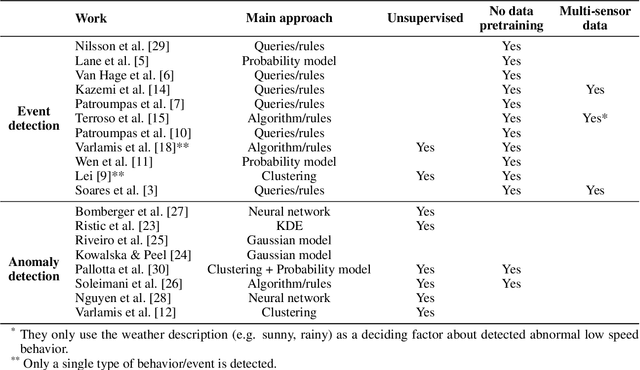
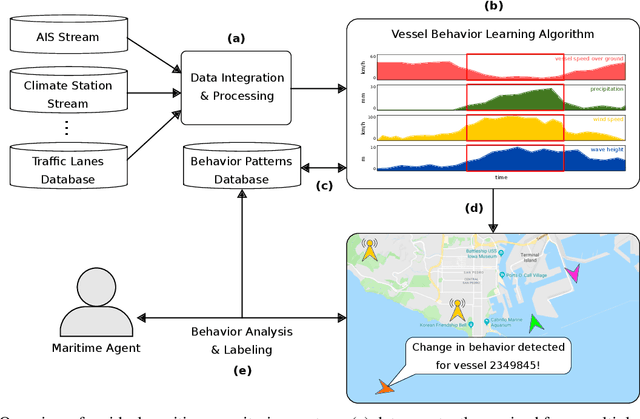
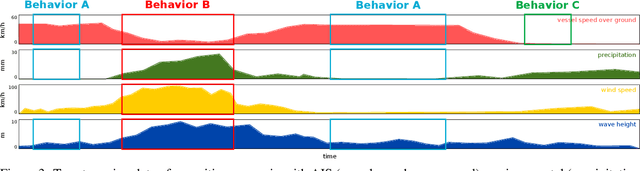
The global expansion of maritime activities and the development of the Automatic Identification System (AIS) have driven the advances in maritime monitoring systems in the last decade. Monitoring vessel behavior is fundamental to safeguard maritime operations, protecting other vessels sailing the ocean and the marine fauna and flora. Given the enormous volume of vessel data continually being generated, real-time analysis of vessel behaviors is only possible because of decision support systems provided with event and anomaly detection methods. However, current works on vessel event detection are ad-hoc methods able to handle only a single or a few predefined types of vessel behavior. Most of the existing approaches do not learn from the data and require the definition of queries and rules for describing each behavior. In this paper, we discuss challenges and opportunities in classical machine learning and deep learning for vessel event and anomaly detection. We hope to motivate the research of novel methods and tools, since addressing these challenges is an essential step towards actual intelligent maritime monitoring systems.
Patient trajectory prediction in the Mimic-III dataset, challenges and pitfalls
Sep 30, 2019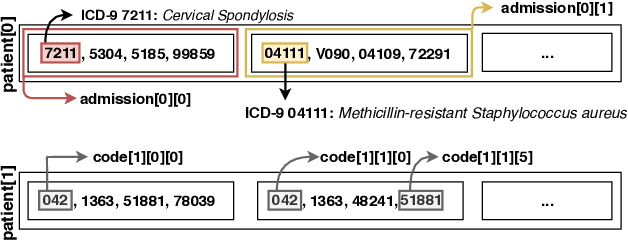
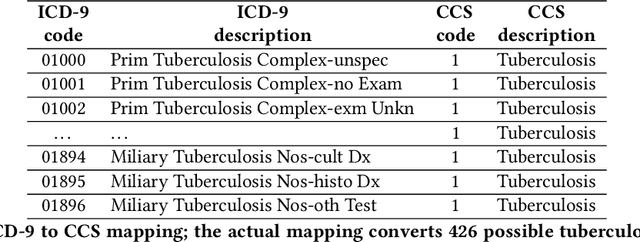
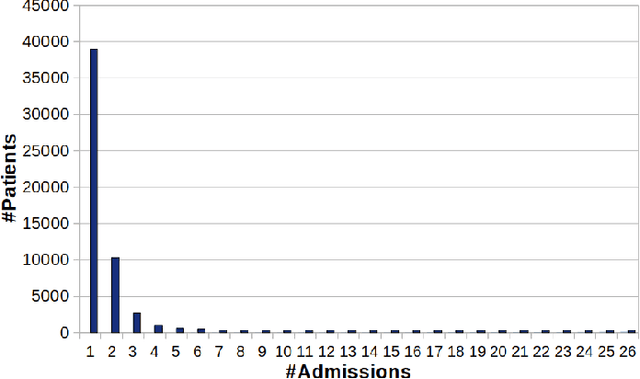
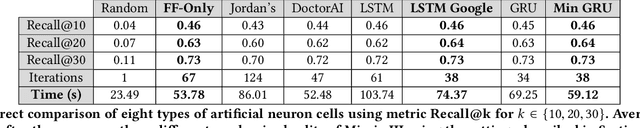
Automated medical prognosis has gained interest as artificial intelligence evolves and the potential for computer-aided medicine becomes evident. Nevertheless, it is challenging to design an effective system that, given a patient's medical history, is able to predict probable future conditions. Previous works, mostly carried out over private datasets, have tackled the problem by using artificial neural network architectures that cannot deal with low-cardinality datasets, or by means of non-generalizable inference approaches. We introduce a Deep Learning architecture whose design results from an intensive experimental process. The final architecture is based on two parallel Minimal Gated Recurrent Unit networks working in bi-directional manner, which was extensively tested with the open-access Mimic-III dataset. Our results demonstrate significant improvements in automated medical prognosis, as measured with Recall@k. We summarize our experience as a set of relevant insights for the design of Deep Learning architectures. Our work improves the performance of computer-aided medicine and can serve as a guide in designing artificial neural networks used in prediction tasks.