 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMoCo-AIS: A Contrastive Learning Framework for Similarity Computation of Vessel Trajectories
Jun 16, 2026Trajectory similarity is a fundamental task in analyzing mobility patterns, essential for applications such as route pattern extraction, mobility prediction, and anomaly detection. Traditional distance-based measures for computing similarity incur high computational cost, driving the adoption of lightweight learning-based approaches. Supervised methods rely on extensive labels derived from traditional distance measures and often reproduce these metrics, which limits generalization. While self-supervised learning addresses this issue through contrastive learning, it lacks a unified framework, making it difficult to compare deep learning (DL) models for consistent trajectory representation. Accordingly, this paper presents MoCo-AIS, a unified framework for learning vessel trajectory embeddings based on the Momentum Contrast (MoCo) paradigm, which formulates similarity learning through positive and negative trajectory pairs. Within this framework, we evaluate a diverse set of leading DL models on large-scale, real-world vessel-tracking AIS datasets that capture diverse navigation behaviors and operating conditions. Results demonstrate that our framework significantly improves similarity learning over existing baselines, while providing a benchmarking platform for evaluating trajectory representation models.
Cross Language Soccer Framework: An Open Source Framework for the RoboCup 2D Soccer Simulation
Jun 09, 2024RoboCup Soccer Simulation 2D (SS2D) research is hampered by the complexity of existing Cpp-based codes like Helios, Cyrus, and Gliders, which also suffer from limited integration with modern machine learning frameworks. This development paper introduces a transformative solution a gRPC-based, language-agnostic framework that seamlessly integrates with the high-performance Helios base code. This approach not only facilitates the use of diverse programming languages including CSharp, JavaScript, and Python but also maintains the computational efficiency critical for real time decision making in SS2D. By breaking down language barriers, our framework significantly enhances collaborative potential and flexibility, empowering researchers to innovate without the overhead of mastering or developing extensive base codes. We invite the global research community to leverage and contribute to the Cross Language Soccer (CLS) framework, which is openly available under the MIT License, to drive forward the capabilities of multi-agent systems in soccer simulations.
Gravity-Informed Deep Learning Framework for Predicting Ship Traffic Flow and Invasion Risk of Non-Indigenous Species via Ballast Water Discharge
Jan 29, 2024Invasive species in water bodies pose a major threat to the environment and biodiversity globally. Due to increased transportation and trade, non-native species have been introduced to new environments, causing damage to ecosystems and leading to economic losses in agriculture, forestry, and fisheries. Therefore, there is a pressing need for risk assessment and management techniques to mitigate the impact of these invasions. This study aims to develop a new physics-inspired model to forecast maritime shipping traffic and thus inform risk assessment of invasive species spread through global transportation networks. Inspired by the gravity model for international trades, our model considers various factors that influence the likelihood and impact of vessel activities, such as shipping flux density, distance between ports, trade flow, and centrality measures of transportation hubs. Additionally, by analyzing the risk network of invasive species, we provide a comprehensive framework for assessing the invasion threat level given a pair of origin and destination. Accordingly, this paper introduces transformers to gravity models to rebuild the short- and long-term dependencies that make the risk analysis feasible. Thus, we introduce a physics-inspired framework that achieves an 89% segmentation accuracy for existing and non-existing trajectories and an 84.8% accuracy for the number of vessels flowing between key port areas, representing more than 10% improvement over the traditional deep-gravity model. Along these lines, this research contributes to a better understanding of invasive species risk assessment. It allows policymakers, conservationists, and stakeholders to prioritize management actions by identifying high-risk invasion pathways. Besides, our model is versatile and can include new data sources, making it suitable for assessing species invasion risks in a changing global landscape.
Improving Dribbling, Passing, and Marking Actions in Soccer Simulation 2D Games Using Machine Learning
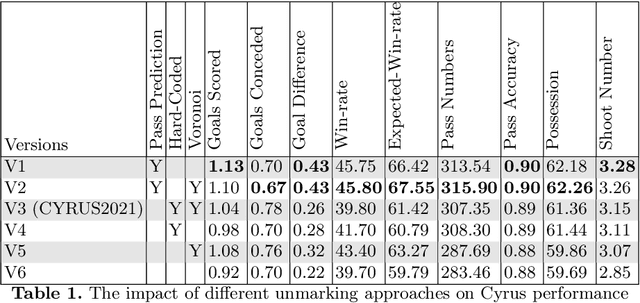
Jan 07, 2024The RoboCup competition was started in 1997, and is known as the oldest RoboCup league. The RoboCup 2D Soccer Simulation League is a stochastic, partially observable soccer environment in which 24 autonomous agents play on two opposing teams. In this paper, we detail the main strategies and functionalities of CYRUS, the RoboCup 2021 2D Soccer Simulation League champions. The new functionalities presented and discussed in this work are (i) Multi Action Dribble, (ii) Pass Prediction and (iii) Marking Decision. The Multi Action Dribbling strategy enabled CYRUS to succeed more often and to be safer when dribbling actions were performed during a game. The Pass Prediction enhanced our gameplay by predicting our teammate's passing behavior, anticipating and making our agents collaborate better towards scoring goals. Finally, the Marking Decision addressed the multi-agent matching problem to improve CYRUS defensive strategy by finding an optimal solution to mark opponents' players.
Building a Safer Maritime Environment Through Multi-Path Long-Term Vessel Trajectory Forecasting
Oct 29, 2023



Maritime transport is paramount to global economic growth and environmental sustainability. In this regard, the Automatic Identification System (AIS) data plays a significant role by offering real-time streaming data on vessel movement, which allows for enhanced traffic surveillance, assisting in vessel safety by avoiding vessel-to-vessel collisions and proactively preventing vessel-to-whale ones. This paper tackles an intrinsic problem to trajectory forecasting: the effective multi-path long-term vessel trajectory forecasting on engineered sequences of AIS data. We utilize an encoder-decoder model with Bidirectional Long Short-Term Memory Networks (Bi-LSTM) to predict the next 12 hours of vessel trajectories using 1 to 3 hours of AIS data. We feed the model with probabilistic features engineered from the AIS data that refer to the potential route and destination of each trajectory so that the model, leveraging convolutional layers for spatial feature learning and a position-aware attention mechanism that increases the importance of recent timesteps of a sequence during temporal feature learning, forecasts the vessel trajectory taking the potential route and destination into account. The F1 Score of these features is approximately 85% and 75%, indicating their efficiency in supplementing the neural network. We trialed our model in the Gulf of St. Lawrence, one of the North Atlantic Right Whales (NARW) habitats, achieving an R2 score exceeding 98% with varying techniques and features. Despite the high R2 score being attributed to well-defined shipping lanes, our model demonstrates superior complex decision-making during path selection. In addition, our model shows enhanced accuracy, with average and median forecasting errors of 11km and 6km, respectively. Our study confirms the potential of geographical data engineering and trajectory forecasting models for preserving marine life species.
Denoising Opponents Position in Partial Observation Environment
Oct 23, 2023The RoboCup competitions hold various leagues, and the Soccer Simulation 2D League is a major among them. Soccer Simulation 2D (SS2D) match involves two teams, including 11 players and a coach for each team, competing against each other. The players can only communicate with the Soccer Simulation Server during the game. Several code bases are released publicly to simplify team development. So researchers can easily focus on decision-making and implementing machine learning methods. SS2D actions and behaviors are only partially accurate due to different challenges, such as noise and partial observation. Therefore, one strategy is to implement alternative denoising methods to tackle observation inaccuracy. Our idea is to predict opponent positions while they have yet to be seen in a finite number of cycles using machine learning methods to make more accurate actions such as pass. We will explain our position prediction idea powered by Long Short-Term Memory models (LSTM) and Deep Neural Networks (DNN). The results show that the LSTM and DNN predict the opponents' position more accurately than the standard algorithm, such as the last-seen method.
Pyrus Base: An Open Source Python Framework for the RoboCup 2D Soccer Simulation
Jul 22, 2023Soccer, also known as football in some parts of the world, involves two teams of eleven players whose objective is to score more goals than the opposing team. To simulate this game and attract scientists from all over the world to conduct research and participate in an annual computer-based soccer world cup, Soccer Simulation 2D (SS2D) was one of the leagues initiated in the RoboCup competition. In every SS2D game, two teams of 11 players and one coach connect to the RoboCup Soccer Simulation Server and compete against each other. Over the past few years, several C++ base codes have been employed to control agents' behavior and their communication with the server. Although C++ base codes have laid the foundation for the SS2D, developing them requires an advanced level of C++ programming. C++ language complexity is a limiting disadvantage of C++ base codes for all users, especially for beginners. To conquer the challenges of C++ base codes and provide a powerful baseline for developing machine learning concepts, we introduce Pyrus, the first Python base code for SS2D. Pyrus is developed to encourage researchers to efficiently develop their ideas and integrate machine learning algorithms into their teams. Pyrus base is open-source code, and it is publicly available under MIT License on GitHub
Cyrus2D base: Source Code Base for RoboCup 2D Soccer Simulation League
Nov 15, 2022Soccer Simulation 2D League is one of the major leagues of RoboCup competitions. In a Soccer Simulation 2D (SS2D) game, two teams of 11 players and one coach compete against each other. Several base codes have been released for the RoboCup soccer simulation 2D (RCSS2D) community that have promoted the application of multi-agent and AI algorithms in this field. In this paper, we introduce "Cyrus2D Base", which is derived from the base code of the RCSS2D 2021 champion. We merged Gliders2D base V2.6 with the newest version of the Helios base. We applied several features of Cyrus2021 to improve the performance and capabilities of this base alongside a Data Extractor to facilitate the implementation of machine learning in the field. We have tested this base code in different teams and scenarios, and the obtained results demonstrate significant improvements in the defensive and offensive strategy of the team.
A semi-supervised geometric-driven methodology for supervised fishing activity detection on multi-source AIS tracking messages
Jul 12, 2022



Automatic Identification System (AIS) messages are useful for tracking vessel activity across oceans worldwide using radio links and satellite transceivers. Such data plays a significant role in tracking vessel activity and mapping mobility patterns such as those found in fishing. Accordingly, this paper proposes a geometric-driven semi-supervised approach for fishing activity detection from AIS data. Through the proposed methodology we show how to explore the information included in the messages to extract features describing the geometry of the vessel route. To this end, we leverage the unsupervised nature of cluster analysis to label the trajectory geometry highlighting the changes in the vessel's moving pattern which tends to indicate fishing activity. The labels obtained by the proposed unsupervised approach are used to detect fishing activities, which we approach as a time-series classification task. In this context, we propose a solution using recurrent neural networks on AIS data streams with roughly 87% of the overall $F$-score on the whole trajectories of 50 different unseen fishing vessels. Such results are accompanied by a broad benchmark study assessing the performance of different Recurrent Neural Network (RNN) architectures. In conclusion, this work contributes by proposing a thorough process that includes data preparation, labeling, data modeling, and model validation. Therefore, we present a novel solution for mobility pattern detection that relies upon unfolding the trajectory in time and observing their inherent geometry.
CYRUS Soccer Simulation 2D Team Description Paper 2021
Jun 06, 2022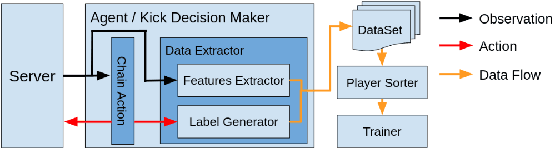
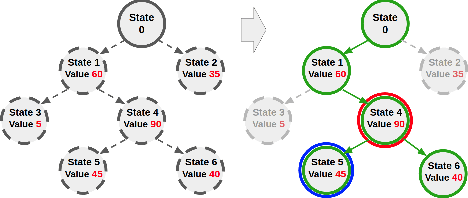
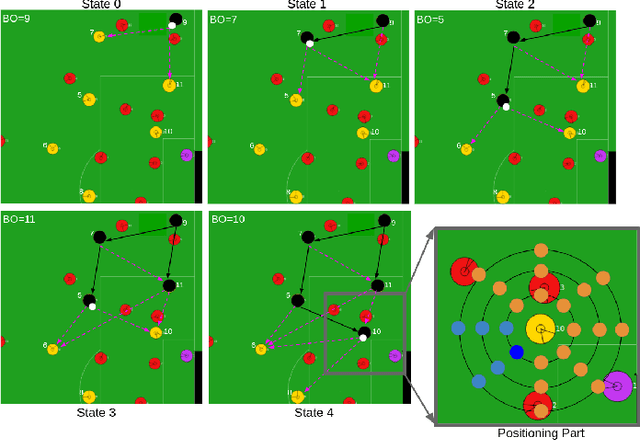
In this report, we briefly present the technical procedure and simulation steps for the 2D soccer simulation of team Cyrus. We emphasize on this document on how the prediction of teammates' behavior is performed. In our proposed method, the agent receives the noisy inputs from the server, and predicts the ball holder full state behavior. Taking advantage of this approach for choosing the optimal view angle shows 11.30% improvement on the expected win rate.