 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCrispEdit: Low-Curvature Projections for Scalable Non-Destructive LLM Editing
Feb 17, 2026A central challenge in large language model (LLM) editing is capability preservation: methods that successfully change targeted behavior can quietly game the editing proxy and corrupt general capabilities, producing degenerate behaviors reminiscent of proxy/reward hacking. We present CrispEdit, a scalable and principled second-order editing algorithm that treats capability preservation as an explicit constraint, unifying and generalizing several existing editing approaches. CrispEdit formulates editing as constrained optimization and enforces the constraint by projecting edit updates onto the low-curvature subspace of the capability-loss landscape. At the crux of CrispEdit is expressing capability constraint via Bregman divergence, whose quadratic form yields the Gauss-Newton Hessian exactly and even when the base model is not trained to convergence. We make this second-order procedure efficient at the LLM scale using Kronecker-factored approximate curvature (K-FAC) and a novel matrix-free projector that exploits Kronecker structure to avoid constructing massive projection matrices. Across standard model-editing benchmarks, CrispEdit achieves high edit success while keeping capability degradation below 1% on average across datasets, significantly improving over prior editors.
Cross Language Soccer Framework: An Open Source Framework for the RoboCup 2D Soccer Simulation
Jun 09, 2024RoboCup Soccer Simulation 2D (SS2D) research is hampered by the complexity of existing Cpp-based codes like Helios, Cyrus, and Gliders, which also suffer from limited integration with modern machine learning frameworks. This development paper introduces a transformative solution a gRPC-based, language-agnostic framework that seamlessly integrates with the high-performance Helios base code. This approach not only facilitates the use of diverse programming languages including CSharp, JavaScript, and Python but also maintains the computational efficiency critical for real time decision making in SS2D. By breaking down language barriers, our framework significantly enhances collaborative potential and flexibility, empowering researchers to innovate without the overhead of mastering or developing extensive base codes. We invite the global research community to leverage and contribute to the Cross Language Soccer (CLS) framework, which is openly available under the MIT License, to drive forward the capabilities of multi-agent systems in soccer simulations.
Improving Dribbling, Passing, and Marking Actions in Soccer Simulation 2D Games Using Machine Learning
Jan 07, 2024The RoboCup competition was started in 1997, and is known as the oldest RoboCup league. The RoboCup 2D Soccer Simulation League is a stochastic, partially observable soccer environment in which 24 autonomous agents play on two opposing teams. In this paper, we detail the main strategies and functionalities of CYRUS, the RoboCup 2021 2D Soccer Simulation League champions. The new functionalities presented and discussed in this work are (i) Multi Action Dribble, (ii) Pass Prediction and (iii) Marking Decision. The Multi Action Dribbling strategy enabled CYRUS to succeed more often and to be safer when dribbling actions were performed during a game. The Pass Prediction enhanced our gameplay by predicting our teammate's passing behavior, anticipating and making our agents collaborate better towards scoring goals. Finally, the Marking Decision addressed the multi-agent matching problem to improve CYRUS defensive strategy by finding an optimal solution to mark opponents' players.
Pyrus Base: An Open Source Python Framework for the RoboCup 2D Soccer Simulation
Jul 22, 2023Soccer, also known as football in some parts of the world, involves two teams of eleven players whose objective is to score more goals than the opposing team. To simulate this game and attract scientists from all over the world to conduct research and participate in an annual computer-based soccer world cup, Soccer Simulation 2D (SS2D) was one of the leagues initiated in the RoboCup competition. In every SS2D game, two teams of 11 players and one coach connect to the RoboCup Soccer Simulation Server and compete against each other. Over the past few years, several C++ base codes have been employed to control agents' behavior and their communication with the server. Although C++ base codes have laid the foundation for the SS2D, developing them requires an advanced level of C++ programming. C++ language complexity is a limiting disadvantage of C++ base codes for all users, especially for beginners. To conquer the challenges of C++ base codes and provide a powerful baseline for developing machine learning concepts, we introduce Pyrus, the first Python base code for SS2D. Pyrus is developed to encourage researchers to efficiently develop their ideas and integrate machine learning algorithms into their teams. Pyrus base is open-source code, and it is publicly available under MIT License on GitHub
Observation Denoising in CYRUS Soccer Simulation 2D Team For RoboCup 2023
May 27, 2023


The RoboCup competitions hold various leagues, and the Soccer Simulation 2D League is a major one among them. Soccer Simulation 2D (SS2D) match involves two teams, including 11 players and a coach, competing against each other. The players can only communicate with the Soccer Simulation Server during the game. This paper presents the latest research of the CYRUS soccer simulation 2D team, the champion of RoboCup 2021. We will explain our denoising idea powered by long short-term memory networks (LSTM) and deep neural networks (DNN). The CYRUS team uses the CYRUS2D base code that was developed based on the Helios and Gliders bases.
Cyrus2D base: Source Code Base for RoboCup 2D Soccer Simulation League
Nov 15, 2022Soccer Simulation 2D League is one of the major leagues of RoboCup competitions. In a Soccer Simulation 2D (SS2D) game, two teams of 11 players and one coach compete against each other. Several base codes have been released for the RoboCup soccer simulation 2D (RCSS2D) community that have promoted the application of multi-agent and AI algorithms in this field. In this paper, we introduce "Cyrus2D Base", which is derived from the base code of the RCSS2D 2021 champion. We merged Gliders2D base V2.6 with the newest version of the Helios base. We applied several features of Cyrus2021 to improve the performance and capabilities of this base alongside a Data Extractor to facilitate the implementation of machine learning in the field. We have tested this base code in different teams and scenarios, and the obtained results demonstrate significant improvements in the defensive and offensive strategy of the team.
CYRUS Soccer Simulation 2D Team Description Paper 2022
May 22, 2022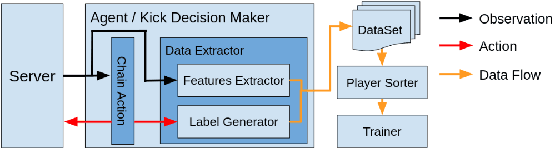
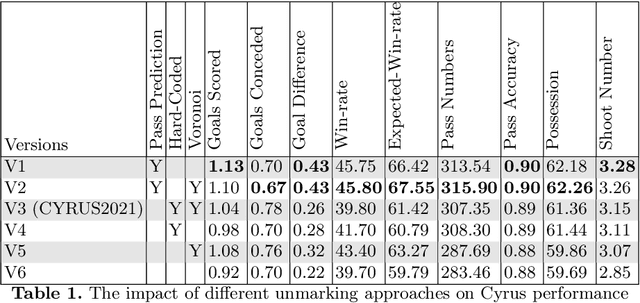
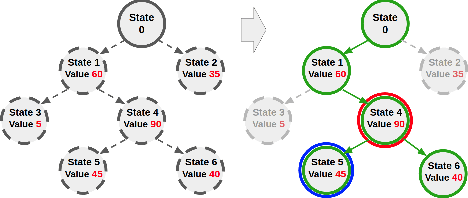
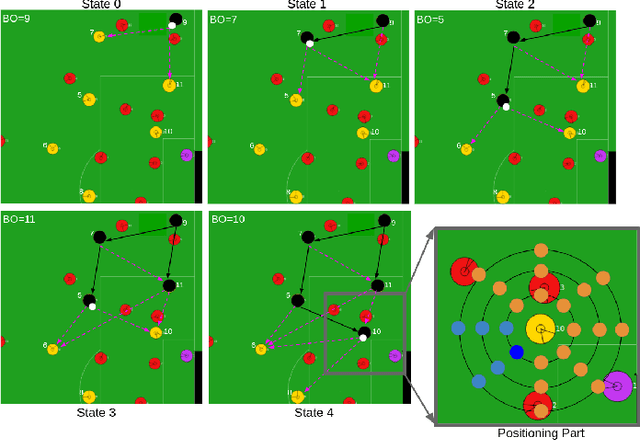
Soccer Simulation 2D League is one of the major leagues of RoboCup competitions. In a Soccer Simulation 2D (SS2D) game, two teams of 11 players and one coach compete against each other. The players are only allowed to communicate with the server that is called Soccer Simulation Server. This paper introduces the previous and current research of the CYRUS soccer simulation team, the champion of RoboCup 2021. We will present our idea about improving Unmarking Decisioning and Positioning by using Pass Prediction Deep Neural Network. Based on our experimental results, this idea proven to be effective on increasing the winning rate of Cyrus against opponents.