 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Understanding the Feasibility of Machine Unlearning
Oct 03, 2024In light of recent privacy regulations, machine unlearning has attracted significant attention in the research community. However, current studies predominantly assess the overall success of unlearning approaches, overlooking the varying difficulty of unlearning individual training samples. As a result, the broader feasibility of machine unlearning remains under-explored. This paper presents a set of novel metrics for quantifying the difficulty of unlearning by jointly considering the properties of target model and data distribution. Specifically, we propose several heuristics to assess the conditions necessary for a successful unlearning operation, examine the variations in unlearning difficulty across different training samples, and present a ranking mechanism to identify the most challenging samples to unlearn. We highlight the effectiveness of the Kernelized Stein Discrepancy (KSD), a parameterized kernel function tailored to each model and dataset, as a heuristic for evaluating unlearning difficulty. Our approach is validated through multiple classification tasks and established machine unlearning algorithms, demonstrating the practical feasibility of unlearning operations across diverse scenarios.
Data-centric Prediction Explanation via Kernelized Stein Discrepancy
Mar 22, 2024Existing example-based prediction explanation methods often bridge test and training data points through the model's parameters or latent representations. While these methods offer clues to the causes of model predictions, they often exhibit innate shortcomings, such as incurring significant computational overhead or producing coarse-grained explanations. This paper presents a Highly-precise and Data-centric Explanation (HD-Explain), a straightforward prediction explanation method exploiting properties of Kernelized Stein Discrepancy (KSD). Specifically, the KSD uniquely defines a parameterized kernel function for a trained model that encodes model-dependent data correlation. By leveraging the kernel function, one can identify training samples that provide the best predictive support to a test point efficiently. We conducted thorough analyses and experiments across multiple classification domains, where we show that HD-Explain outperforms existing methods from various aspects, including 1) preciseness (fine-grained explanation), 2) consistency, and 3) computation efficiency, leading to a surprisingly simple, effective, and robust prediction explanation solution.
Engineering Features to Improve Pass Prediction in Soccer Simulation 2D Games
Jan 07, 2024Soccer Simulation 2D (SS2D) is a simulation of a real soccer game in two dimensions. In soccer, passing behavior is an essential action for keeping the ball in possession of our team and creating goal opportunities. Similarly, for SS2D, predicting the passing behaviors of both opponents and our teammates helps manage resources and score more goals. Therefore, in this research, we have tried to address the modeling of passing behavior of soccer 2D players using Deep Neural Networks (DNN) and Random Forest (RF). We propose an embedded data extraction module that can record the decision-making of agents in an online format. Afterward, we apply four data sorting techniques for training data preparation. After, we evaluate the trained models' performance playing against 6 top teams of RoboCup 2019 that have distinctive playing strategies. Finally, we examine the importance of different feature groups on the prediction of a passing strategy. All results in each step of this work prove our suggested methodology's effectiveness and improve the performance of the pass prediction in Soccer Simulation 2D games ranging from 5\% (e.g., playing against the same team) to 10\% (e.g., playing against Robocup top teams).
Improving Dribbling, Passing, and Marking Actions in Soccer Simulation 2D Games Using Machine Learning
Jan 07, 2024The RoboCup competition was started in 1997, and is known as the oldest RoboCup league. The RoboCup 2D Soccer Simulation League is a stochastic, partially observable soccer environment in which 24 autonomous agents play on two opposing teams. In this paper, we detail the main strategies and functionalities of CYRUS, the RoboCup 2021 2D Soccer Simulation League champions. The new functionalities presented and discussed in this work are (i) Multi Action Dribble, (ii) Pass Prediction and (iii) Marking Decision. The Multi Action Dribbling strategy enabled CYRUS to succeed more often and to be safer when dribbling actions were performed during a game. The Pass Prediction enhanced our gameplay by predicting our teammate's passing behavior, anticipating and making our agents collaborate better towards scoring goals. Finally, the Marking Decision addressed the multi-agent matching problem to improve CYRUS defensive strategy by finding an optimal solution to mark opponents' players.
Pyrus Base: An Open Source Python Framework for the RoboCup 2D Soccer Simulation
Jul 22, 2023Soccer, also known as football in some parts of the world, involves two teams of eleven players whose objective is to score more goals than the opposing team. To simulate this game and attract scientists from all over the world to conduct research and participate in an annual computer-based soccer world cup, Soccer Simulation 2D (SS2D) was one of the leagues initiated in the RoboCup competition. In every SS2D game, two teams of 11 players and one coach connect to the RoboCup Soccer Simulation Server and compete against each other. Over the past few years, several C++ base codes have been employed to control agents' behavior and their communication with the server. Although C++ base codes have laid the foundation for the SS2D, developing them requires an advanced level of C++ programming. C++ language complexity is a limiting disadvantage of C++ base codes for all users, especially for beginners. To conquer the challenges of C++ base codes and provide a powerful baseline for developing machine learning concepts, we introduce Pyrus, the first Python base code for SS2D. Pyrus is developed to encourage researchers to efficiently develop their ideas and integrate machine learning algorithms into their teams. Pyrus base is open-source code, and it is publicly available under MIT License on GitHub
Observation Denoising in CYRUS Soccer Simulation 2D Team For RoboCup 2023
May 27, 2023


The RoboCup competitions hold various leagues, and the Soccer Simulation 2D League is a major one among them. Soccer Simulation 2D (SS2D) match involves two teams, including 11 players and a coach, competing against each other. The players can only communicate with the Soccer Simulation Server during the game. This paper presents the latest research of the CYRUS soccer simulation 2D team, the champion of RoboCup 2021. We will explain our denoising idea powered by long short-term memory networks (LSTM) and deep neural networks (DNN). The CYRUS team uses the CYRUS2D base code that was developed based on the Helios and Gliders bases.
Cyrus2D base: Source Code Base for RoboCup 2D Soccer Simulation League
Nov 15, 2022Soccer Simulation 2D League is one of the major leagues of RoboCup competitions. In a Soccer Simulation 2D (SS2D) game, two teams of 11 players and one coach compete against each other. Several base codes have been released for the RoboCup soccer simulation 2D (RCSS2D) community that have promoted the application of multi-agent and AI algorithms in this field. In this paper, we introduce "Cyrus2D Base", which is derived from the base code of the RCSS2D 2021 champion. We merged Gliders2D base V2.6 with the newest version of the Helios base. We applied several features of Cyrus2021 to improve the performance and capabilities of this base alongside a Data Extractor to facilitate the implementation of machine learning in the field. We have tested this base code in different teams and scenarios, and the obtained results demonstrate significant improvements in the defensive and offensive strategy of the team.
CYRUS Soccer Simulation 2D Team Description Paper 2021
Jun 06, 2022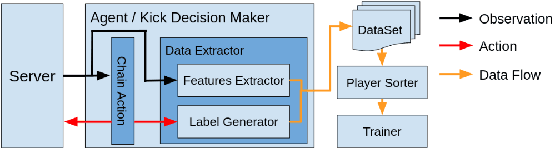
In this report, we briefly present the technical procedure and simulation steps for the 2D soccer simulation of team Cyrus. We emphasize on this document on how the prediction of teammates' behavior is performed. In our proposed method, the agent receives the noisy inputs from the server, and predicts the ball holder full state behavior. Taking advantage of this approach for choosing the optimal view angle shows 11.30% improvement on the expected win rate.
CYRUS Soccer Simulation 2D Team Description Paper 2022
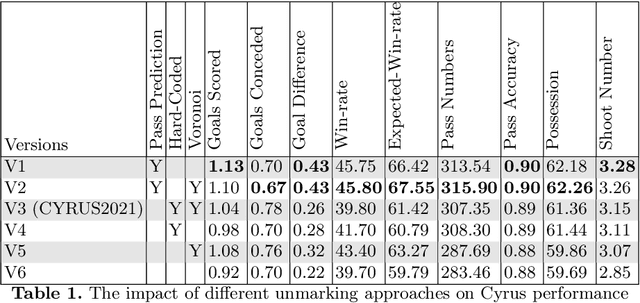
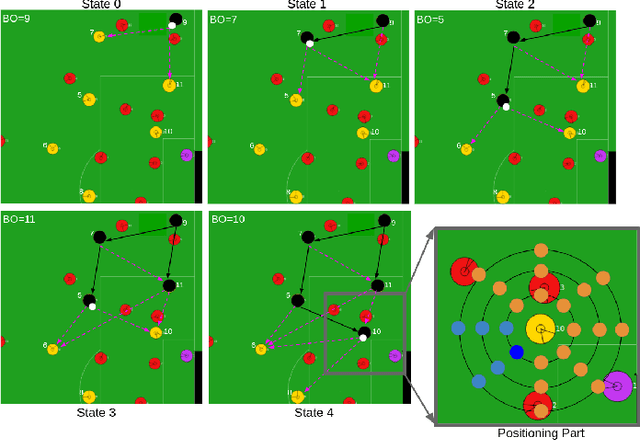
May 22, 2022Soccer Simulation 2D League is one of the major leagues of RoboCup competitions. In a Soccer Simulation 2D (SS2D) game, two teams of 11 players and one coach compete against each other. The players are only allowed to communicate with the server that is called Soccer Simulation Server. This paper introduces the previous and current research of the CYRUS soccer simulation team, the champion of RoboCup 2021. We will present our idea about improving Unmarking Decisioning and Positioning by using Pass Prediction Deep Neural Network. Based on our experimental results, this idea proven to be effective on increasing the winning rate of Cyrus against opponents.
Continuous Control with Deep Reinforcement Learning for Autonomous Vessels
Jun 27, 2021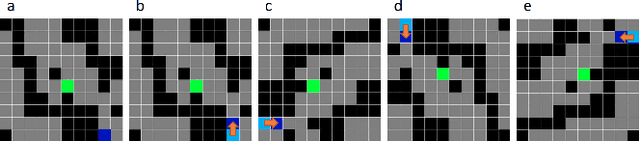
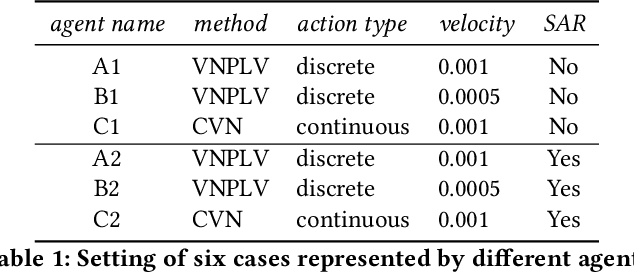
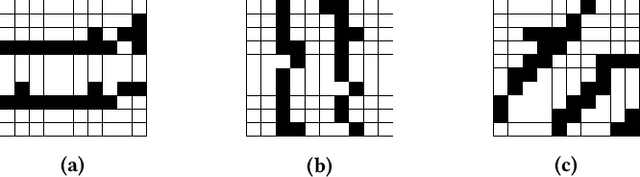
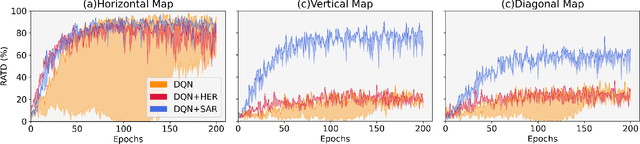
Maritime autonomous transportation has played a crucial role in the globalization of the world economy. Deep Reinforcement Learning (DRL) has been applied to automatic path planning to simulate vessel collision avoidance situations in open seas. End-to-end approaches that learn complex mappings directly from the input have poor generalization to reach the targets in different environments. In this work, we present a new strategy called state-action rotation to improve agent's performance in unseen situations by rotating the obtained experience (state-action-state) and preserving them in the replay buffer. We designed our model based on Deep Deterministic Policy Gradient, local view maker, and planner. Our agent uses two deep Convolutional Neural Networks to estimate the policy and action-value functions. The proposed model was exhaustively trained and tested in maritime scenarios with real maps from cities such as Montreal and Halifax. Experimental results show that the state-action rotation on top of the CVN consistently improves the rate of arrival to a destination (RATD) by up 11.96% with respect to the Vessel Navigator with Planner and Local View (VNPLV), as well as it achieves superior performance in unseen mappings by up 30.82%. Our proposed approach exhibits advantages in terms of robustness when tested in a new environment, supporting the idea that generalization can be achieved by using state-action rotation.