 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCAFE: Towards Compact, Adaptive, and Fast Embedding for Large-scale Recommendation Models
Dec 06, 2023



Recently, the growing memory demands of embedding tables in Deep Learning Recommendation Models (DLRMs) pose great challenges for model training and deployment. Existing embedding compression solutions cannot simultaneously meet three key design requirements: memory efficiency, low latency, and adaptability to dynamic data distribution. This paper presents CAFE, a Compact, Adaptive, and Fast Embedding compression framework that addresses the above requirements. The design philosophy of CAFE is to dynamically allocate more memory resources to important features (called hot features), and allocate less memory to unimportant ones. In CAFE, we propose a fast and lightweight sketch data structure, named HotSketch, to capture feature importance and report hot features in real time. For each reported hot feature, we assign it a unique embedding. For the non-hot features, we allow multiple features to share one embedding by using hash embedding technique. Guided by our design philosophy, we further propose a multi-level hash embedding framework to optimize the embedding tables of non-hot features. We theoretically analyze the accuracy of HotSketch, and analyze the model convergence against deviation. Extensive experiments show that CAFE significantly outperforms existing embedding compression methods, yielding 3.92% and 3.68% superior testing AUC on Criteo Kaggle dataset and CriteoTB dataset at a compression ratio of 10000x. The source codes of CAFE are available at GitHub.
Deep Learning-based Inertial Odometry for Pedestrian Tracking using Attention Mechanism and Res2Net Module
May 20, 2022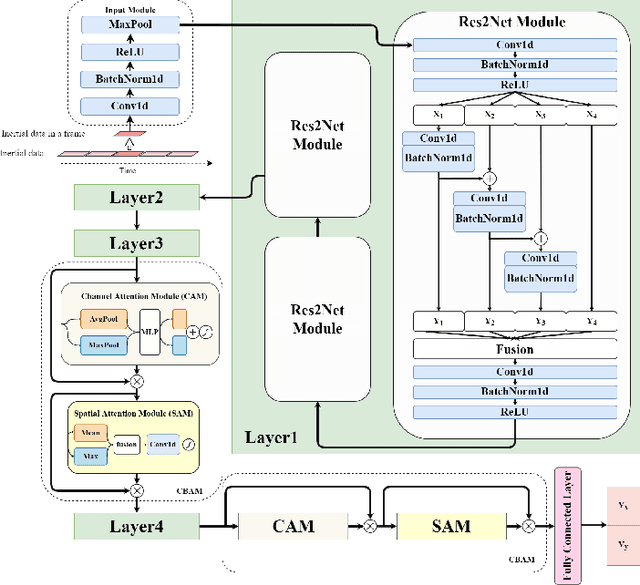
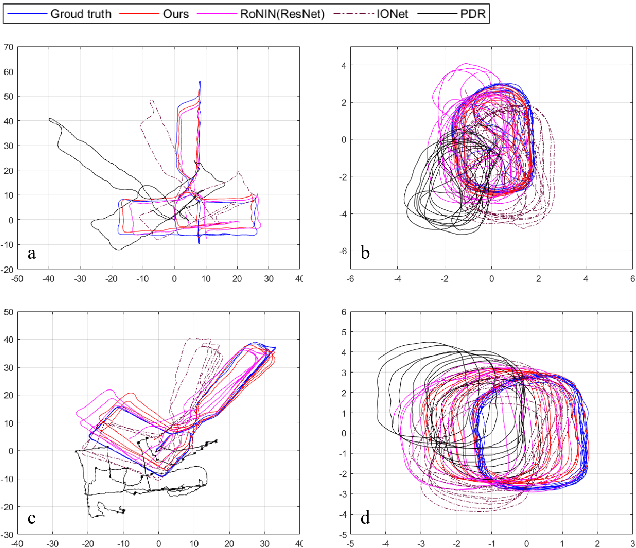
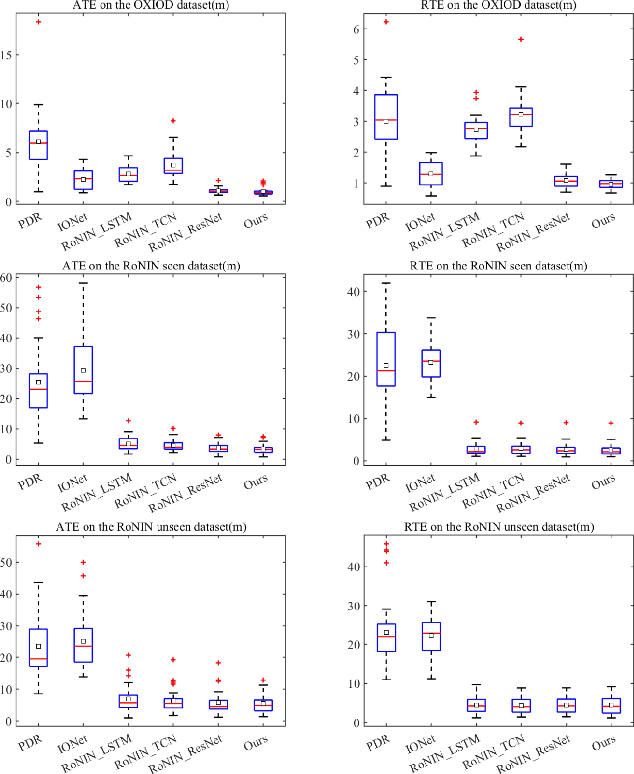
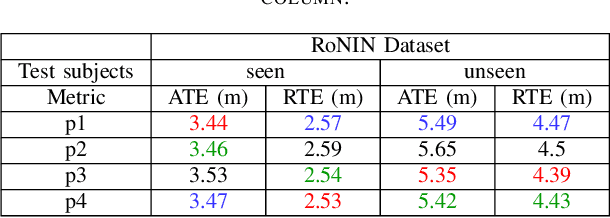
Pedestrian dead reckoning is a challenging task due to the low-cost inertial sensor error accumulation. Recent research has shown that deep learning methods can achieve impressive performance in handling this issue. In this letter, we propose inertial odometry using a deep learning-based velocity estimation method. The deep neural network based on Res2Net modules and two convolutional block attention modules is leveraged to restore the potential connection between the horizontal velocity vector and raw inertial data from a smartphone. Our network is trained using only fifty percent of the public inertial odometry dataset (RoNIN) data. Then, it is validated on the RoNIN testing dataset and another public inertial odometry dataset (OXIOD). Compared with the traditional step-length and heading system-based algorithm, our approach decreases the absolute translation error (ATE) by 76%-86%. In addition, compared with the state-of-the-art deep learning method (RoNIN), our method improves its ATE by 6%-31.4%.