 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning-based Inertial Odometry for Pedestrian Tracking using Attention Mechanism and Res2Net Module
Paper and Code
May 20, 2022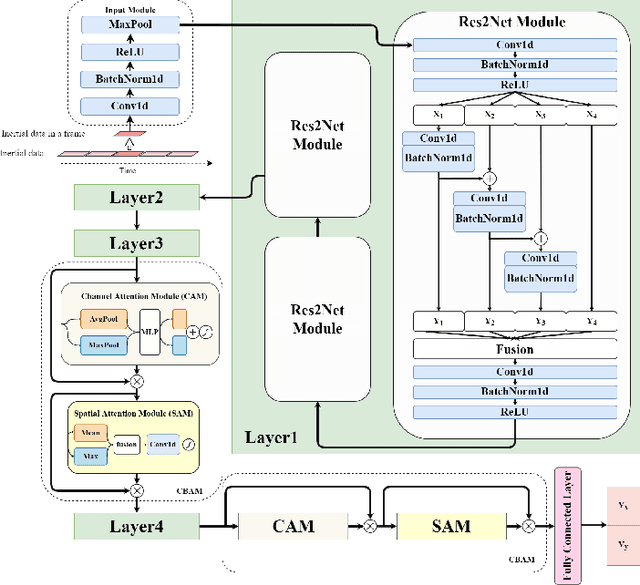
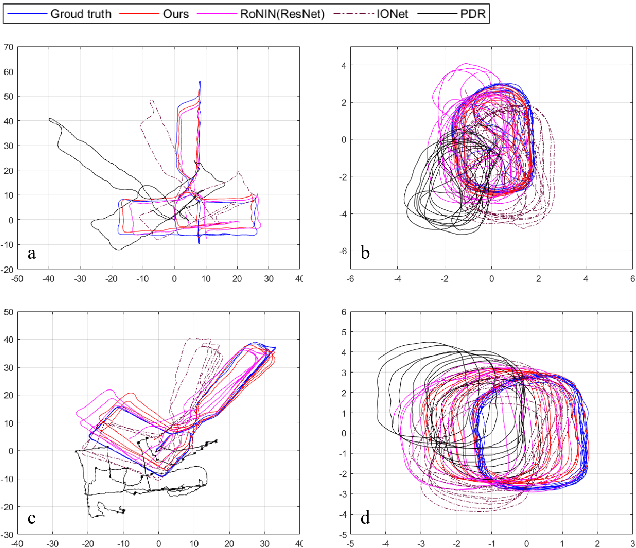
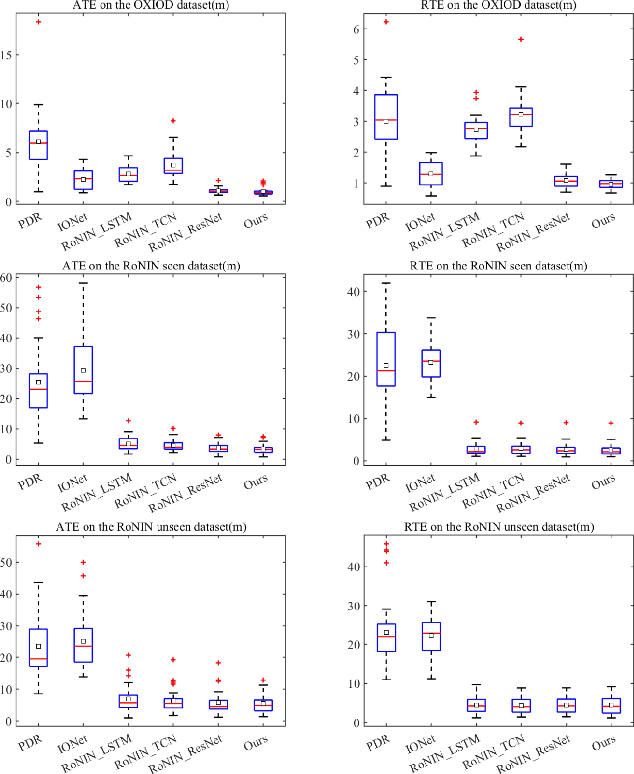
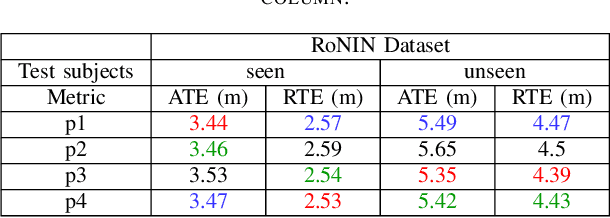
Pedestrian dead reckoning is a challenging task due to the low-cost inertial sensor error accumulation. Recent research has shown that deep learning methods can achieve impressive performance in handling this issue. In this letter, we propose inertial odometry using a deep learning-based velocity estimation method. The deep neural network based on Res2Net modules and two convolutional block attention modules is leveraged to restore the potential connection between the horizontal velocity vector and raw inertial data from a smartphone. Our network is trained using only fifty percent of the public inertial odometry dataset (RoNIN) data. Then, it is validated on the RoNIN testing dataset and another public inertial odometry dataset (OXIOD). Compared with the traditional step-length and heading system-based algorithm, our approach decreases the absolute translation error (ATE) by 76%-86%. In addition, compared with the state-of-the-art deep learning method (RoNIN), our method improves its ATE by 6%-31.4%.