 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSnail-Radar: A large-scale diverse dataset for the evaluation of 4D-radar-based SLAM systems
Jul 16, 2024



4D radars are increasingly favored for odometry and mapping of autonomous systems due to their robustness in harsh weather and dynamic environments. Existing datasets, however, often cover limited areas and are typically captured using a single platform. To address this gap, we present a diverse large-scale dataset specifically designed for 4D radar-based localization and mapping. This dataset was gathered using three different platforms: a handheld device, an e-bike, and an SUV, under a variety of environmental conditions, including clear days, nighttime, and heavy rain. The data collection occurred from September 2023 to February 2024, encompassing diverse settings such as roads in a vegetated campus and tunnels on highways. Each route was traversed multiple times to facilitate place recognition evaluations. The sensor suite included a 3D lidar, 4D radars, stereo cameras, consumer-grade IMUs, and a GNSS/INS system. Sensor data packets were synchronized to GNSS time using a two-step process: a convex hull algorithm was applied to smooth host time jitter, and then odometry and correlation algorithms were used to correct constant time offsets. Extrinsic calibration between sensors was achieved through manual measurements and subsequent nonlinear optimization. The reference motion for the platforms was generated by registering lidar scans to a terrestrial laser scanner (TLS) point cloud map using a lidar inertial odometry (LIO) method in localization mode. Additionally, a data reversion technique was introduced to enable backward LIO processing. We believe this dataset will boost research in radar-based point cloud registration, odometry, mapping, and place recognition.
A Review and Comparative Study of Close-Range Geometric Camera Calibration Tools
Jun 15, 2023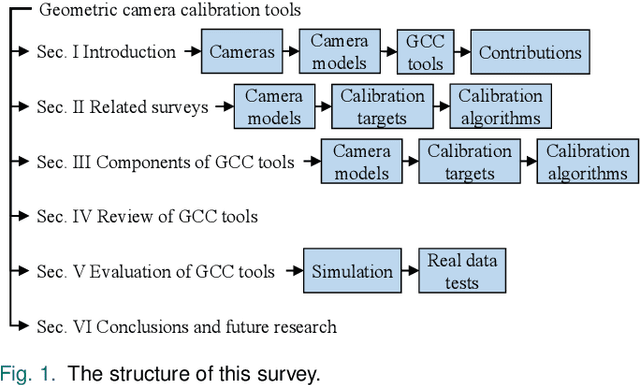
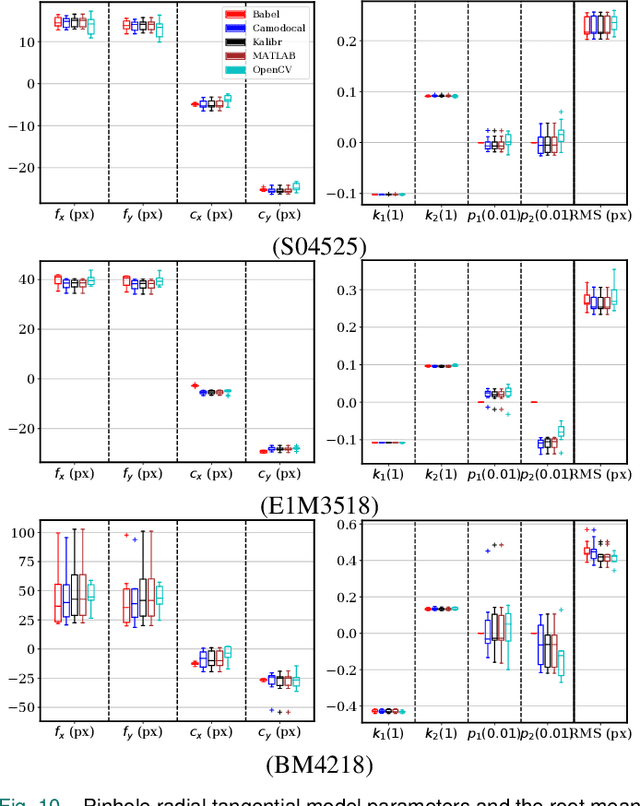
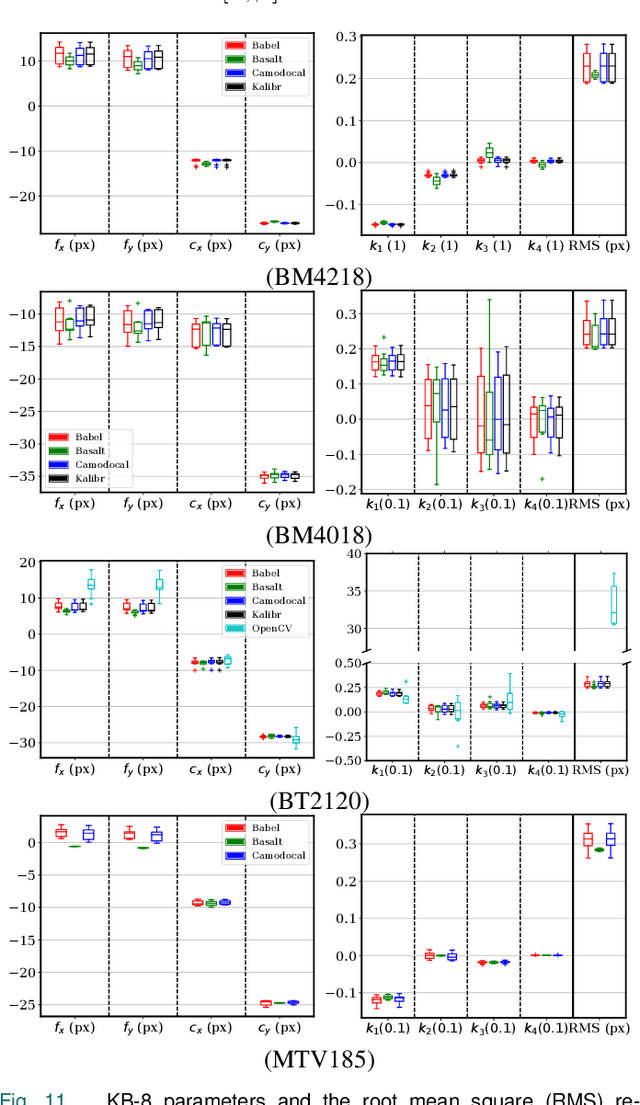
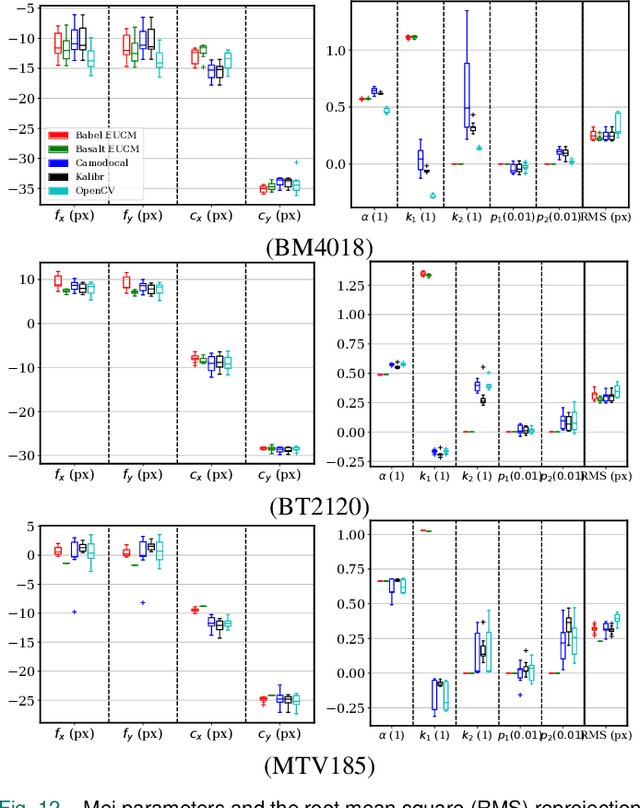
In many camera-based applications, it is necessary to find the geometric relationship between incoming rays and image pixels, i.e., the projection model, through the geometric camera calibration (GCC). Aiming to provide practical calibration guidelines, this work surveys and evaluates the existing GCC tools. The survey covers camera models, calibration targets, and algorithms used in these tools, highlighting their properties and the trends in GCC development. The evaluation compares six target-based GCC tools, namely, BabelCalib, Basalt, Camodocal, Kalibr, the MATLAB calibrator, and the OpenCV-based ROS calibrator, with simulated and real data for cameras of wide-angle and fisheye lenses described by three traditional projection models. These tests reveal the strengths and weaknesses of these camera models, as well as the repeatability of these GCC tools. In view of the survey and evaluation, future research directions of GCC are also discussed.
4D iRIOM: 4D Imaging Radar Inertial Odometry and Mapping
Apr 03, 2023Millimeter wave radar can measure distances, directions, and Doppler velocity for objects in harsh conditions such as fog. The 4D imaging radar with both vertical and horizontal data resembling an image can also measure objects' height. Previous studies have used 3D radars for ego-motion estimation. But few methods leveraged the rich data of imaging radars, and they usually omitted the mapping aspect, thus leading to inferior odometry accuracy. This paper presents a real-time imaging radar inertial odometry and mapping method, iRIOM, based on the submap concept. To deal with moving objects and multipath reflections, we use the graduated non-convexity method to robustly and efficiently estimate ego-velocity from a single scan. To measure the agreement between sparse non-repetitive radar scan points and submap points, the distribution-to-multi-distribution distance for matches is adopted. The ego-velocity, scan-to-submap matches are fused with the 6D inertial data by an iterative extended Kalman filter to get the platform's 3D position and orientation. A loop closure module is also developed to curb the odometry module's drift. To our knowledge, iRIOM based on the two modules is the first 4D radar inertial SLAM system. On our and third-party data, we show iRIOM's favorable odometry accuracy and mapping consistency against the FastLIO-SLAM and the EKFRIO. Also, the ablation study reveal the benefit of inertial data versus the constant velocity model, and scan-to-submap matching versus scan-to-scan matching.