 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGarment Recovery with Shape and Deformation Priors
Nov 17, 2023



While modeling people wearing tight-fitting clothing has made great strides in recent years, loose-fitting clothing remains a challenge. We propose a method that delivers realistic garment models from real-world images, regardless of garment shape or deformation. To this end, we introduce a fitting approach that utilizes shape and deformation priors learned from synthetic data to accurately capture garment shapes and deformations, including large ones. Not only does our approach recover the garment geometry accurately, it also yields models that can be directly used by downstream applications such as animation and simulation.
ISP: Multi-Layered Garment Draping with Implicit Sewing Patterns
May 23, 2023



Many approaches to draping individual garments on human body models are realistic, fast, and yield outputs that are differentiable with respect to the body shape on which they are draped. However, none of them can handle multi-layered clothing, which is prevalent in everyday dress. In this paper, we introduce a parametric garment representation model that can. As in models used by clothing designers, each garment consists of individual 2D panels. Their 2D shape is defined by a Signed Distance Function and 3D shape by a 2D to 3D mapping. The 2D parameterization enables easy detection of potential collisions and the 3D parameterization handles complex shapes effectively. We show that this combination is faster and yields higher quality reconstructions than purely implicit surface representations, and makes the recovery of layered garments from images possible thanks to its differentiability. Furthermore, it supports rapid editing of garment shapes and texture by modifying individual 2D panels.
DrapeNet: Generating Garments and Draping them with Self-Supervision
Dec 07, 2022



Recent approaches to drape garments quickly over arbitrary human bodies leverage self-supervision to eliminate the need for large training sets. However, they are designed to train one network per clothing item, which severely limits their generalization abilities. In our work, we rely on self-supervision to train a single network to drape multiple garments. This is achieved by predicting a 3D deformation field conditioned on the latent codes of a generative network, which models garments as unsigned distance fields. Our pipeline can generate and drape previously unseen garments of any topology, whose shape can be edited by manipulating their latent codes. Being fully differentiable, our formulation makes it possible to recover accurate 3D models of garments from partial observations -- images or 3D scans -- via gradient descent. Our code will be made publicly available.
DIG: Draping Implicit Garment over the Human Body
Sep 24, 2022
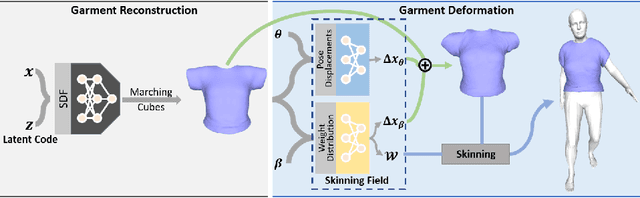

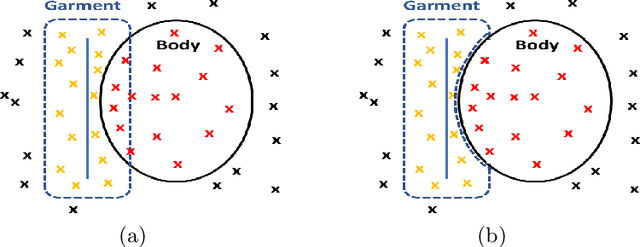
Existing data-driven methods for draping garments over human bodies, despite being effective, cannot handle garments of arbitrary topology and are typically not end-to-end differentiable. To address these limitations, we propose an end-to-end differentiable pipeline that represents garments using implicit surfaces and learns a skinning field conditioned on shape and pose parameters of an articulated body model. To limit body-garment interpenetrations and artifacts, we propose an interpenetration-aware pre-processing strategy of training data and a novel training loss that penalizes self-intersections while draping garments. We demonstrate that our method yields more accurate results for garment reconstruction and deformation with respect to state of the art methods. Furthermore, we show that our method, thanks to its end-to-end differentiability, allows to recover body and garments parameters jointly from image observations, something that previous work could not do.
MeshSDF: Differentiable Iso-Surface Extraction
Jun 06, 2020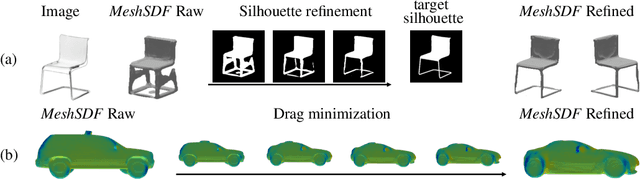
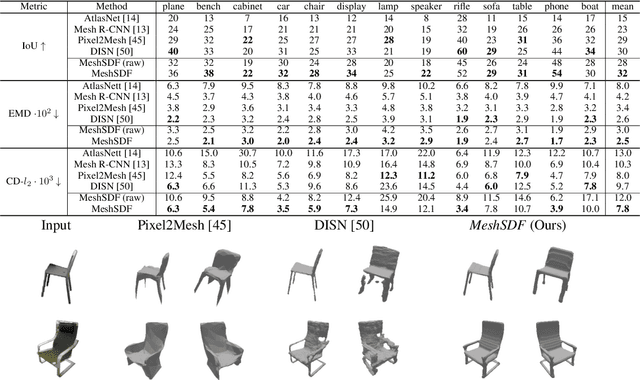
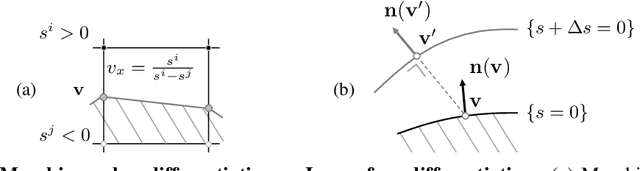
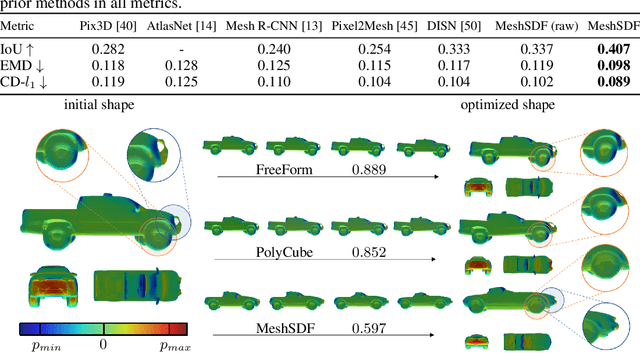
Geometric Deep Learning has recently made striking progress with the advent of continuous Deep Implicit Fields. They allow for detailed modeling of watertight surfaces of arbitrary topology while not relying on a 3D Euclidean grid, resulting in a learnable parameterization that is not limited in resolution. Unfortunately, these methods are often not suitable for applications that require an explicit mesh-based surface representation because converting an implicit field to such a representation relies on the Marching Cubes algorithm, which cannot be differentiated with respect to the underlying implicit field. In this work, we remove this limitation and introduce a differentiable way to produce explicit surface mesh representations from Deep Signed Distance Functions. Our key insight is that by reasoning on how implicit field perturbations impact local surface geometry, one can ultimately differentiate the 3D location of surface samples with respect to the underlying deep implicit field. We exploit this to define MeshSDF, an end-to-end differentiable mesh representation which can vary its topology. We use two different applications to validate our theoretical insight: Single-View Reconstruction via Differentiable Rendering and Physically-Driven Shape Optimization. In both cases our differentiable parameterization gives us an edge over state-of-the-art algorithms.