 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZero-shot Sim-to-Real Transfer for Reinforcement Learning-based Visual Servoing of Soft Continuum Arms
Apr 23, 2025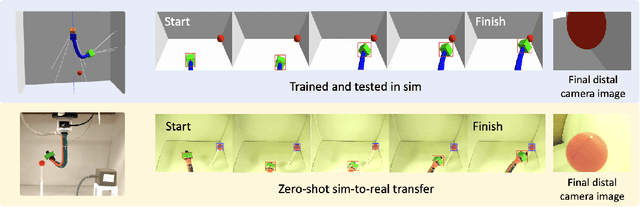
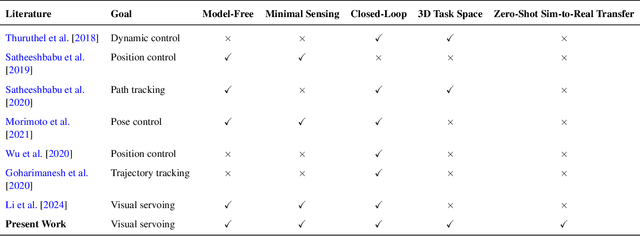
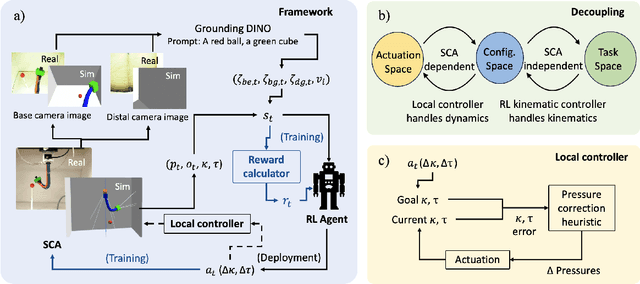
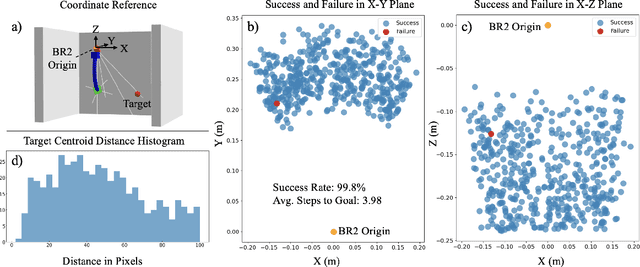
Soft continuum arms (SCAs) soft and deformable nature presents challenges in modeling and control due to their infinite degrees of freedom and non-linear behavior. This work introduces a reinforcement learning (RL)-based framework for visual servoing tasks on SCAs with zero-shot sim-to-real transfer capabilities, demonstrated on a single section pneumatic manipulator capable of bending and twisting. The framework decouples kinematics from mechanical properties using an RL kinematic controller for motion planning and a local controller for actuation refinement, leveraging minimal sensing with visual feedback. Trained entirely in simulation, the RL controller achieved a 99.8% success rate. When deployed on hardware, it achieved a 67% success rate in zero-shot sim-to-real transfer, demonstrating robustness and adaptability. This approach offers a scalable solution for SCAs in 3D visual servoing, with potential for further refinement and expanded applications.
Precision Harvesting in Cluttered Environments: Integrating End Effector Design with Dual Camera Perception
Jan 31, 2025



Due to labor shortages in specialty crop industries, a need for robotic automation to increase agricultural efficiency and productivity has arisen. Previous manipulation systems perform well in harvesting in uncluttered and structured environments. High tunnel environments are more compact and cluttered in nature, requiring a rethinking of the large form factor systems and grippers. We propose a novel codesigned framework incorporating a global detection camera and a local eye-in-hand camera that demonstrates precise localization of small fruits via closed-loop visual feedback and reliable error handling. Field experiments in high tunnels show our system can reach an average of 85.0\% of cherry tomato fruit in 10.98s on average.
Visual Servoing for Pose Control of Soft Continuum Arm in a Structured Environment
Feb 11, 2022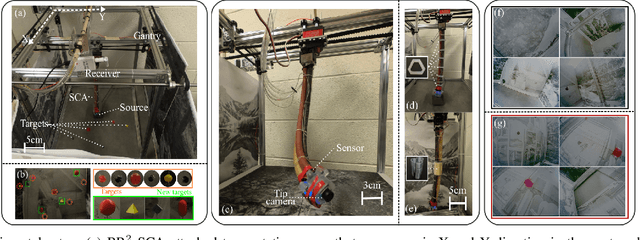

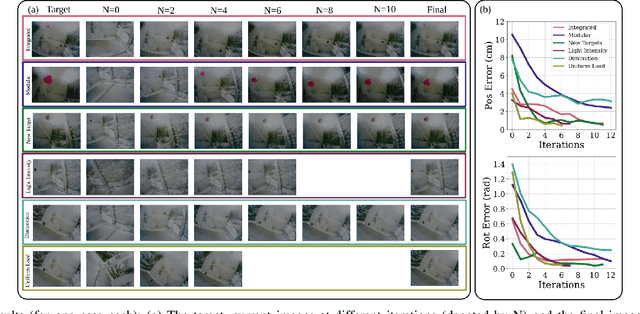
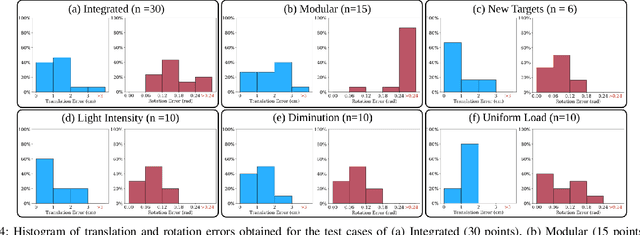
For soft continuum arms, visual servoing is a popular control strategy that relies on visual feedback to close the control loop. However, robust visual servoing is challenging as it requires reliable feature extraction from the image, accurate control models and sensors to perceive the shape of the arm, both of which can be hard to implement in a soft robot. This letter circumvents these challenges by presenting a deep neural network-based method to perform smooth and robust 3D positioning tasks on a soft arm by visual servoing using a camera mounted at the distal end of the arm. A convolutional neural network is trained to predict the actuations required to achieve the desired pose in a structured environment. Integrated and modular approaches for estimating the actuations from the image are proposed and are experimentally compared. A proportional control law is implemented to reduce the error between the desired and current image as seen by the camera. The model together with the proportional feedback control makes the described approach robust to several variations such as new targets, lighting, loads, and diminution of the soft arm. Furthermore, the model lends itself to be transferred to a new environment with minimal effort.