 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrecision Harvesting in Cluttered Environments: Integrating End Effector Design with Dual Camera Perception
Jan 31, 2025



Due to labor shortages in specialty crop industries, a need for robotic automation to increase agricultural efficiency and productivity has arisen. Previous manipulation systems perform well in harvesting in uncluttered and structured environments. High tunnel environments are more compact and cluttered in nature, requiring a rethinking of the large form factor systems and grippers. We propose a novel codesigned framework incorporating a global detection camera and a local eye-in-hand camera that demonstrates precise localization of small fruits via closed-loop visual feedback and reliable error handling. Field experiments in high tunnels show our system can reach an average of 85.0\% of cherry tomato fruit in 10.98s on average.
Integrating Open-World Shared Control in Immersive Avatars
Jan 05, 2024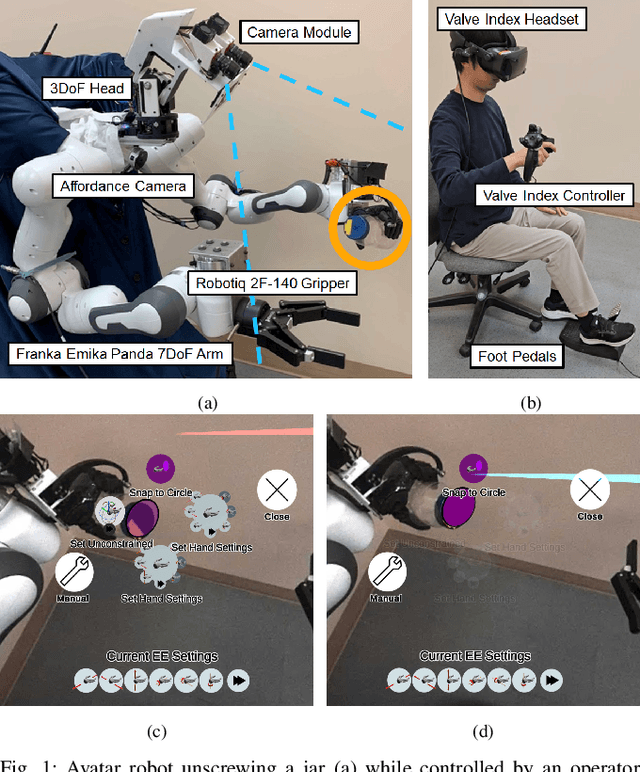

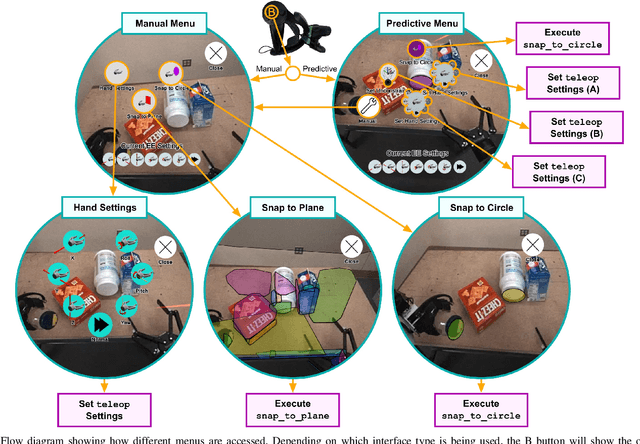
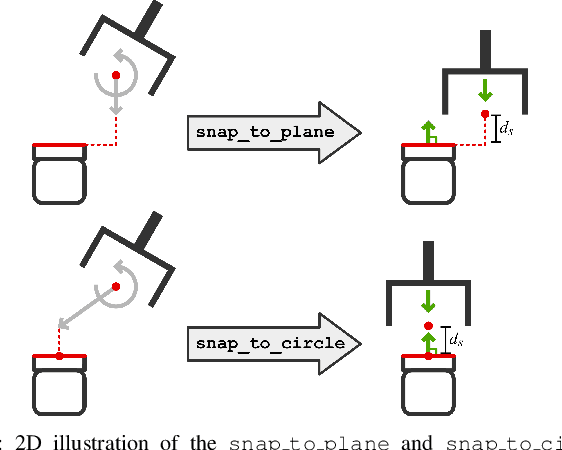
Teleoperated avatar robots allow people to transport their manipulation skills to environments that may be difficult or dangerous to work in. Current systems are able to give operators direct control of many components of the robot to immerse them in the remote environment, but operators still struggle to complete tasks as competently as they could in person. We present a framework for incorporating open-world shared control into avatar robots to combine the benefits of direct and shared control. This framework preserves the fluency of our avatar interface by minimizing obstructions to the operator's view and using the same interface for direct, shared, and fully autonomous control. In a human subjects study (N=19), we find that operators using this framework complete a range of tasks significantly more quickly and reliably than those that do not.