 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZero-shot Sim-to-Real Transfer for Reinforcement Learning-based Visual Servoing of Soft Continuum Arms
Paper and Code
Apr 23, 2025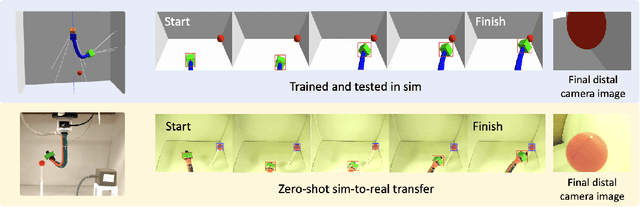
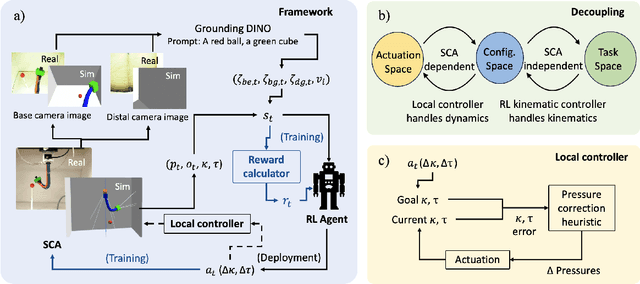
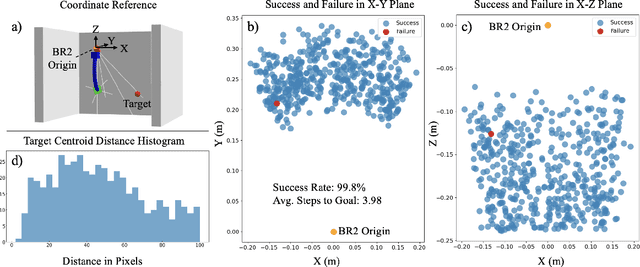
Soft continuum arms (SCAs) soft and deformable nature presents challenges in modeling and control due to their infinite degrees of freedom and non-linear behavior. This work introduces a reinforcement learning (RL)-based framework for visual servoing tasks on SCAs with zero-shot sim-to-real transfer capabilities, demonstrated on a single section pneumatic manipulator capable of bending and twisting. The framework decouples kinematics from mechanical properties using an RL kinematic controller for motion planning and a local controller for actuation refinement, leveraging minimal sensing with visual feedback. Trained entirely in simulation, the RL controller achieved a 99.8% success rate. When deployed on hardware, it achieved a 67% success rate in zero-shot sim-to-real transfer, demonstrating robustness and adaptability. This approach offers a scalable solution for SCAs in 3D visual servoing, with potential for further refinement and expanded applications.