 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometry-Grounded Gaussian Splatting
Jan 25, 2026Gaussian Splatting (GS) has demonstrated impressive quality and efficiency in novel view synthesis. However, shape extraction from Gaussian primitives remains an open problem. Due to inadequate geometry parameterization and approximation, existing shape reconstruction methods suffer from poor multi-view consistency and are sensitive to floaters. In this paper, we present a rigorous theoretical derivation that establishes Gaussian primitives as a specific type of stochastic solids. This theoretical framework provides a principled foundation for Geometry-Grounded Gaussian Splatting by enabling the direct treatment of Gaussian primitives as explicit geometric representations. Using the volumetric nature of stochastic solids, our method efficiently renders high-quality depth maps for fine-grained geometry extraction. Experiments show that our method achieves the best shape reconstruction results among all Gaussian Splatting-based methods on public datasets.
RaDe-GS: Rasterizing Depth in Gaussian Splatting
Jun 03, 2024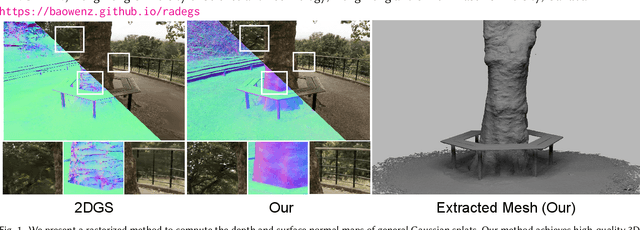
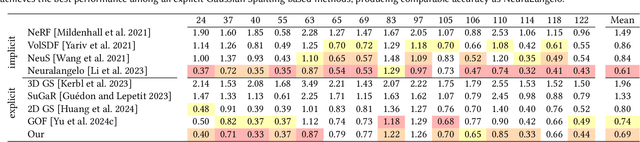
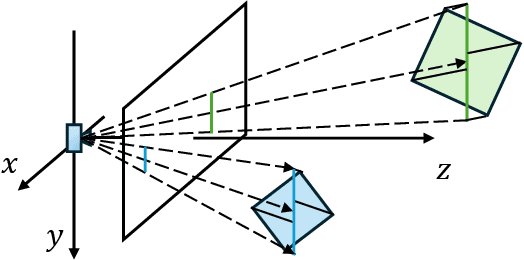
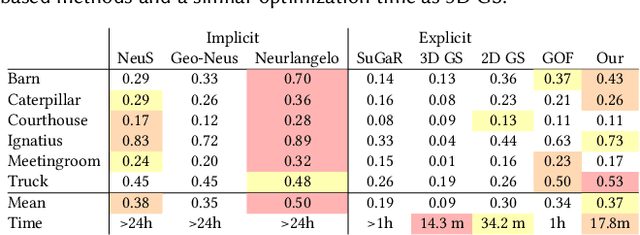
Gaussian Splatting (GS) has proven to be highly effective in novel view synthesis, achieving high-quality and real-time rendering. However, its potential for reconstructing detailed 3D shapes has not been fully explored. Existing methods often suffer from limited shape accuracy due to the discrete and unstructured nature of Gaussian splats, which complicates the shape extraction. While recent techniques like 2D GS have attempted to improve shape reconstruction, they often reformulate the Gaussian primitives in ways that reduce both rendering quality and computational efficiency. To address these problems, our work introduces a rasterized approach to render the depth maps and surface normal maps of general 3D Gaussian splats. Our method not only significantly enhances shape reconstruction accuracy but also maintains the computational efficiency intrinsic to Gaussian Splatting. Our approach achieves a Chamfer distance error comparable to NeuraLangelo on the DTU dataset and similar training and rendering time as traditional Gaussian Splatting on the Tanks & Temples dataset. Our method is a significant advancement in Gaussian Splatting and can be directly integrated into existing Gaussian Splatting-based methods.
Self-supervised Learning of Implicit Shape Representation with Dense Correspondence for Deformable Objects
Aug 24, 2023



Learning 3D shape representation with dense correspondence for deformable objects is a fundamental problem in computer vision. Existing approaches often need additional annotations of specific semantic domain, e.g., skeleton poses for human bodies or animals, which require extra annotation effort and suffer from error accumulation, and they are limited to specific domain. In this paper, we propose a novel self-supervised approach to learn neural implicit shape representation for deformable objects, which can represent shapes with a template shape and dense correspondence in 3D. Our method does not require the priors of skeleton and skinning weight, and only requires a collection of shapes represented in signed distance fields. To handle the large deformation, we constrain the learned template shape in the same latent space with the training shapes, design a new formulation of local rigid constraint that enforces rigid transformation in local region and addresses local reflection issue, and present a new hierarchical rigid constraint to reduce the ambiguity due to the joint learning of template shape and correspondences. Extensive experiments show that our model can represent shapes with large deformations. We also show that our shape representation can support two typical applications, such as texture transfer and shape editing, with competitive performance. The code and models are available at https://iscas3dv.github.io/deformshape
EvHandPose: Event-based 3D Hand Pose Estimation with Sparse Supervision
Mar 06, 2023



Event camera shows great potential in 3D hand pose estimation, especially addressing the challenges of fast motion and high dynamic range in a low-power way. However, due to the asynchronous differential imaging mechanism, it is challenging to design event representation to encode hand motion information especially when the hands are not moving (causing motion ambiguity), and it is infeasible to fully annotate the temporally dense event stream. In this paper, we propose EvHandPose with novel hand flow representations in Event-to-Pose module for accurate hand pose estimation and alleviating the motion ambiguity issue. To solve the problem under sparse annotation, we design contrast maximization and edge constraints in Pose-to-IWE (Image with Warped Events) module and formulate EvHandPose in a self-supervision framework. We further build EvRealHands, the first large-scale real-world event-based hand pose dataset on several challenging scenes to bridge the domain gap due to relying on synthetic data and facilitate future research. Experiments on EvRealHands demonstrate that EvHandPose outperforms previous event-based method under all evaluation scenes with 15 $\sim$ 20 mm lower MPJPE and achieves accurate and stable hand pose estimation in fast motion and strong light scenes compared with RGB-based methods. Furthermore, EvHandPose demonstrates 3D hand pose estimation at 120 fps or higher.