 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNested Inheritance Dynamics
Apr 23, 2024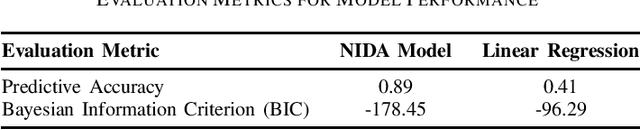
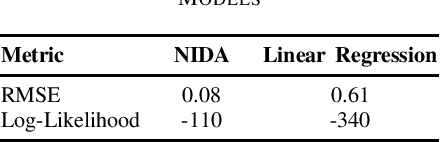


The idea of the inheritance of biological processes, such as the developmental process or the life cycle of an organism, has been discussed in the biology literature, but formal mathematical descriptions and plausible data analysis frameworks are lacking. We introduce an extension of the nested Dirichlet Process (nDP) to a multiscale model to aid in understanding the mechanisms by which biological processes are inherited, remain stable, and are modified across generations. To address these issues, we introduce Nested Inheritance Dynamics Algorithm (NIDA). At its primary level, NIDA encompasses all processes unfolding within an individual organism's lifespan. The secondary level delineates the dynamics through which these processes evolve or remain stable over time. This framework allows for the specification of a physical system model at either scale, thus promoting seamless integration with established models of development and heredity.
Bayesian Nonparametrics: An Alternative to Deep Learning
Mar 29, 2024Bayesian nonparametric models offer a flexible and powerful framework for statistical model selection, enabling the adaptation of model complexity to the intricacies of diverse datasets. This survey intends to delve into the significance of Bayesian nonparametrics, particularly in addressing complex challenges across various domains such as statistics, computer science, and electrical engineering. By elucidating the basic properties and theoretical foundations of these nonparametric models, this survey aims to provide a comprehensive understanding of Bayesian nonparametrics and their relevance in addressing complex problems, particularly in the domain of multi-object tracking. Through this exploration, we uncover the versatility and efficacy of Bayesian nonparametric methodologies, paving the way for innovative solutions to intricate challenges across diverse disciplines.
Bayesian Nonparametric View to Spawning
Dec 03, 2021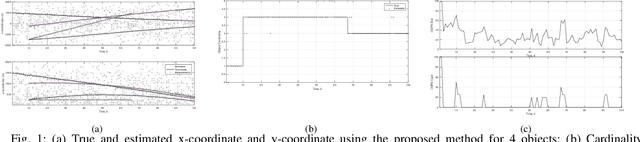
In tracking multiple objects, it is often assumed that each observation (measurement) is originated from one and only one object. However, we may encounter a situation that each measurement may or may not be associated with multiple objects at each time step --spawning. Therefore, the association of each measurement to multiple objects is a crucial task to perform in order to track multiple objects with birth and death. In this paper, we introduce a novel Bayesian nonparametric approach that models a scenario where each observation may be drawn from an unknown number of objects for which it provides a tractable Markov chain Monte Carlo (MCMC) approach to sample from the posterior distribution. The number of objects at each time step, itself, is also assumed to be unknown. We, then, show through experiments the advantage of nonparametric modeling to scenarios with spawning events. Our experiment results also demonstrate the advantages of our framework over the existing methods.
Bayesian Nonparametric Modelling for Model-Free Reinforcement Learning in LTE-LAA and Wi-Fi Coexistence
Jul 06, 2021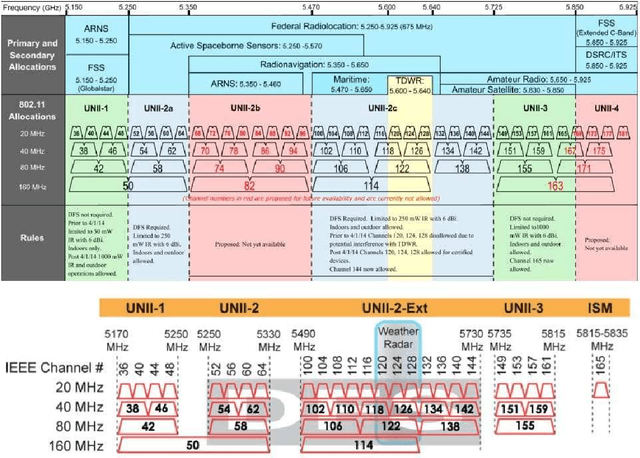
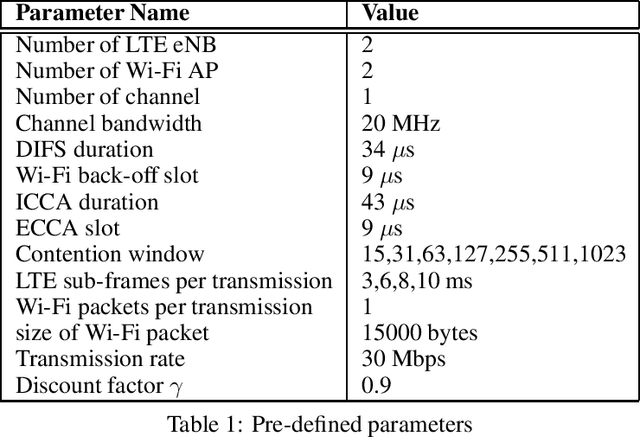

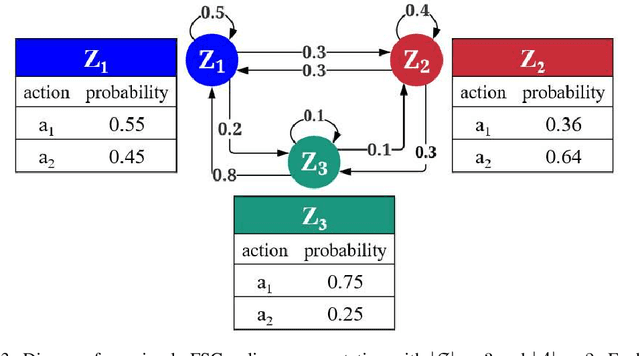
With the arrival of next generation wireless communication, a growing number of new applications like internet of things, autonomous driving systems, and drone are crowding the unlicensed spectrum. Licensed network such as the long-term evolution (LTE) also comes to the unlicensed spectrum for better providing high-capacity contents with low cost. However, LTE was not designed to share resources with others. Previous solutions usually work on fixed scenarios. This work features a Nonparametric Bayesian reinforcement learning algorithm to cope with the coexistence between Wi-Fi and LTE licensed assisted access (LTE-LAA) agents in 5 GHz unlicensed spectrum. The coexistence problem is modeled as a decentralized partially-observable Markov decision process (Dec-POMDP) and Bayesian inference is adopted for policy learning with nonparametric prior to accommodate the uncertainty of policy for different agents. A fairness measure is introduced in the reward function to encourage fair sharing between agents. Variational inference for posterior model approximation is considered to make the algorithm computationally efficient. Simulation results demonstrate that this algorithm can reach high value with compact policy representations in few learning iterations.
Use of Bayesian Nonparametric methods for Estimating the Measurements in High Clutter
Nov 30, 2020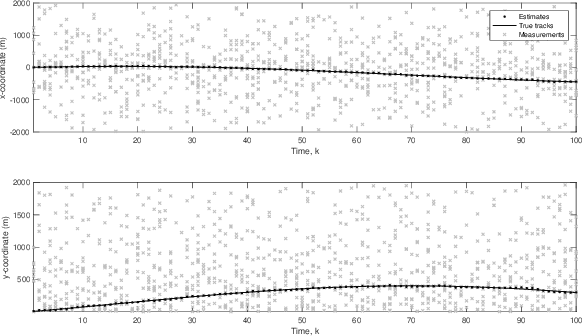
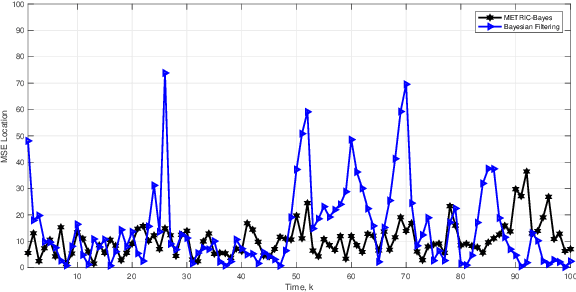
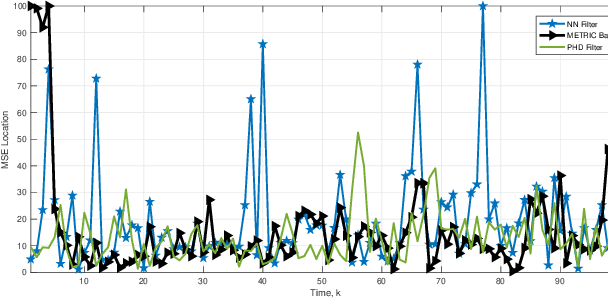
Robust tracking of a target in a clutter environment is an important and challenging task. In recent years, the nearest neighbor methods and probabilistic data association filters were proposed. However, the performance of these methods diminishes as the number of measurements increases. In this paper, we propose a robust generative approach to effectively model multiple sensor measurements for tracking a moving target in an environment with high clutter. We assume a time-dependent number of measurements that include sensor observations with unknown origin, some of which may only contain clutter with no additional information. We robustly and accurately estimate the trajectory of the moving target in a high clutter environment with an unknown number of clutters by employing Bayesian nonparametric modeling. In particular, we employ a class of joint Bayesian nonparametric models to construct the joint prior distribution of target and clutter measurements such that the conditional distributions follow a Dirichlet process. The marginalized Dirichlet process prior of the target measurements is then used in a Bayesian tracker to estimate the dynamically-varying target state. We show through experiments that the tracking performance and effectiveness of our proposed framework are increased by suppressing high clutter measurements. In addition, we show that our proposed method outperforms existing methods such as nearest neighbor and probability data association filters.
Causal Adversarial Network for Learning Conditional and Interventional Distributions
Sep 21, 2020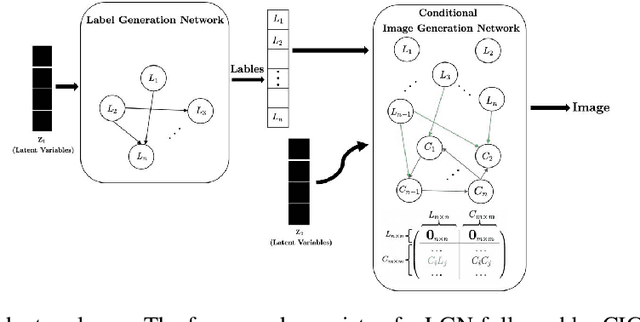
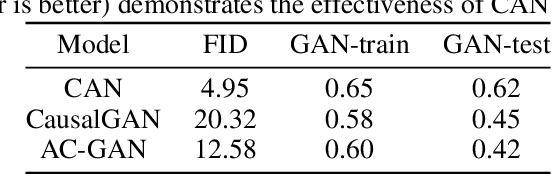
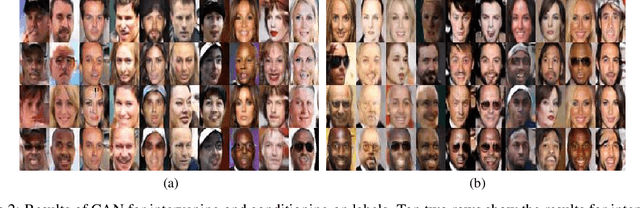

We propose a generative Causal Adversarial Network (CAN) for learning and sampling from conditional and interventional distributions. In contrast to the existing CausalGAN which requires the causal graph to be given, our proposed framework learns the causal relations from the data and generates samples accordingly. The proposed CAN comprises a two-fold process namely Label Generation Network (LGN) and Conditional Image Generation Network (CIGN). The LGN is a GAN-based architecture which learns and samples from the causal model over labels. The sampled labels are then fed to CIGN, a conditional GAN architecture, which learns the relationships amongst labels and pixels and pixels themselves and generates samples based on them. This framework is equipped with an intervention mechanism which enables. the model to generate samples from interventional distributions. We quantitatively and qualitatively assess the performance of CAN and empirically show that our model is able to generate both interventional and conditional samples without having access to the causal graph for the application of face generation on CelebA data.
Bayesian nonparametric modeling for predicting dynamic dependencies in multiple object tracking
Apr 22, 2020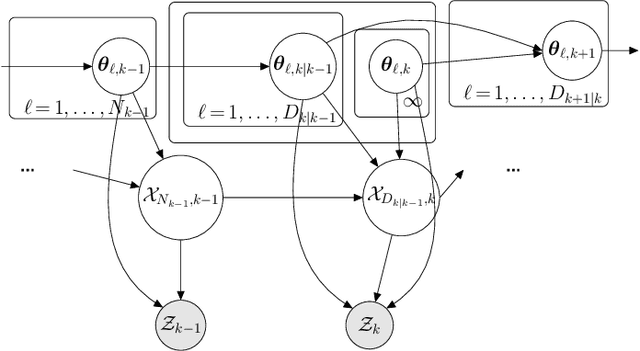
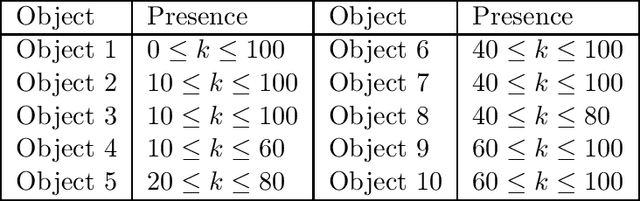
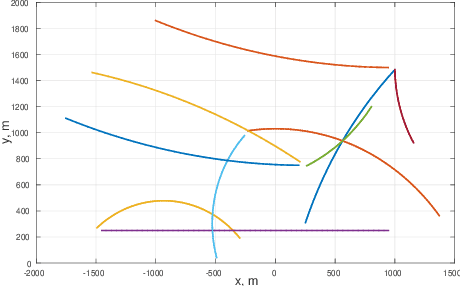

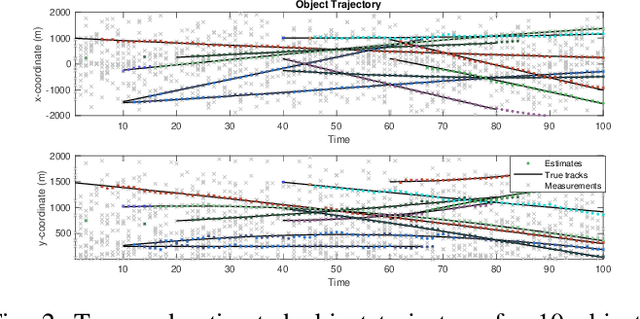
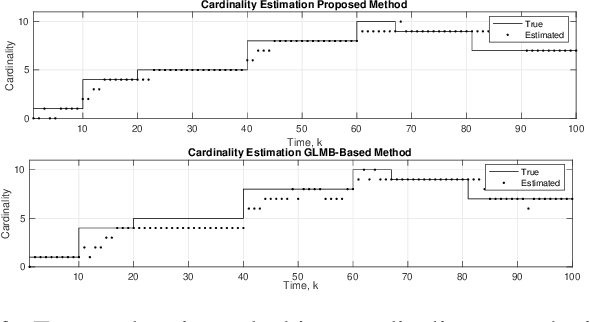
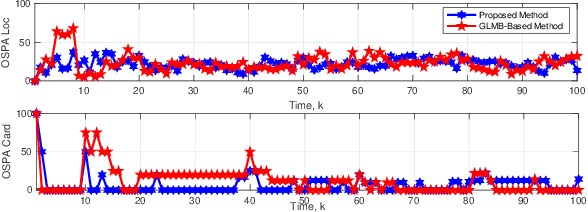
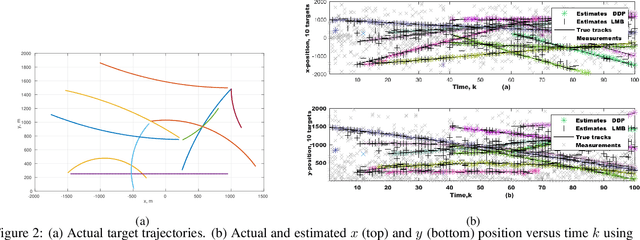
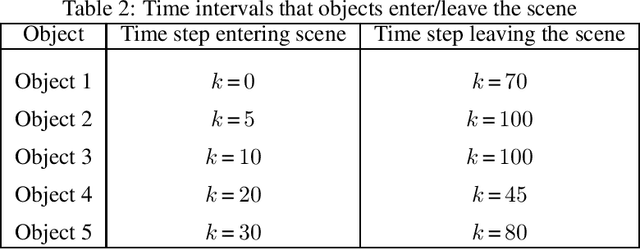
Some challenging problems in tracking multiple objects include the time-dependent cardinality, unordered measurements and object parameter labeling. In this paper, we employ Bayesian Bayesian nonparametric methods to address these challenges. In particular, we propose modeling the multiple object parameter state prior using the dependent Dirichlet and Pitman-Yor processes. These nonparametric models have been shown to be more flexible and robust, when compared to existing methods, for estimating the time-varying number of objects, providing object labeling and identifying measurement to object associations. Monte Carlo sampling methods are then proposed to efficiently learn the trajectory of objects from noisy measurements. Using simulations, we demonstrate the estimation performance advantage of the new methods when compared to existing algorithms such as the generalized labeled multi-Bernoulli filter.
Inference for multiple object tracking: A Bayesian nonparametric approach
Sep 16, 2019

In recent years, multi object tracking (MOT) problem has drawn attention to it and has been studied in various research areas. However, some of the challenging problems including time dependent cardinality, unordered measurement set, and object labeling remain unclear. In this paper, we propose robust nonparametric methods to model the state prior for MOT problem. These models are shown to be more flexible and robust compared to existing methods. In particular, the overall approach estimates time dependent object cardinality, provides object labeling, and identifies object associated measurements. Moreover, our proposed framework dynamically contends with the birth/death and survival of the objects through dependent nonparametric processes. We present Inference algorithms that demonstrate the utility of the dependent nonparametric models for tracking. We employ Monte Carlo sampling methods to demonstrate the proposed algorithms efficiently learn the trajectory of objects from noisy measurements. The computational results display the performance of the proposed algorithms and comparison not only between one another, but also between proposed algorithms and labeled multi Bernoulli tracker.