 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInference for multiple object tracking: A Bayesian nonparametric approach
Paper and Code
Sep 16, 2019

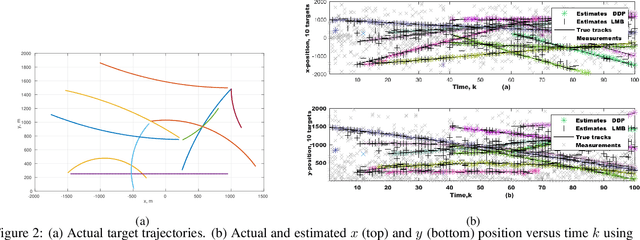
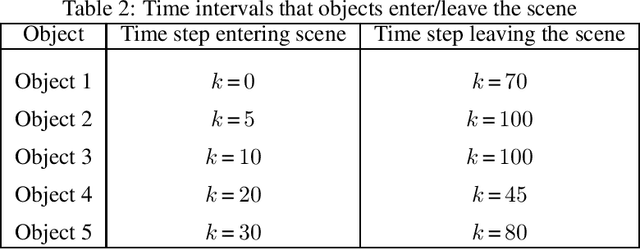
In recent years, multi object tracking (MOT) problem has drawn attention to it and has been studied in various research areas. However, some of the challenging problems including time dependent cardinality, unordered measurement set, and object labeling remain unclear. In this paper, we propose robust nonparametric methods to model the state prior for MOT problem. These models are shown to be more flexible and robust compared to existing methods. In particular, the overall approach estimates time dependent object cardinality, provides object labeling, and identifies object associated measurements. Moreover, our proposed framework dynamically contends with the birth/death and survival of the objects through dependent nonparametric processes. We present Inference algorithms that demonstrate the utility of the dependent nonparametric models for tracking. We employ Monte Carlo sampling methods to demonstrate the proposed algorithms efficiently learn the trajectory of objects from noisy measurements. The computational results display the performance of the proposed algorithms and comparison not only between one another, but also between proposed algorithms and labeled multi Bernoulli tracker.