 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian nonparametric modeling for predicting dynamic dependencies in multiple object tracking
Apr 22, 2020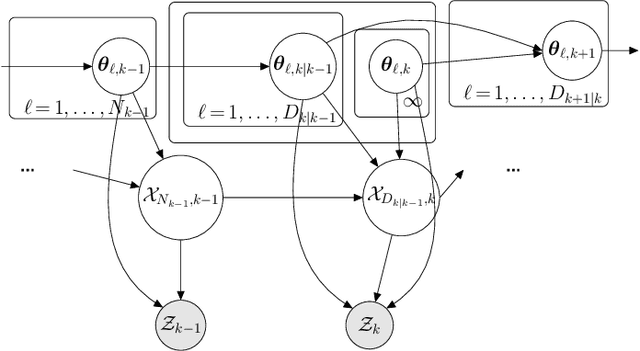

Some challenging problems in tracking multiple objects include the time-dependent cardinality, unordered measurements and object parameter labeling. In this paper, we employ Bayesian Bayesian nonparametric methods to address these challenges. In particular, we propose modeling the multiple object parameter state prior using the dependent Dirichlet and Pitman-Yor processes. These nonparametric models have been shown to be more flexible and robust, when compared to existing methods, for estimating the time-varying number of objects, providing object labeling and identifying measurement to object associations. Monte Carlo sampling methods are then proposed to efficiently learn the trajectory of objects from noisy measurements. Using simulations, we demonstrate the estimation performance advantage of the new methods when compared to existing algorithms such as the generalized labeled multi-Bernoulli filter.