 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUse of Bayesian Nonparametric methods for Estimating the Measurements in High Clutter
Paper and Code
Nov 30, 2020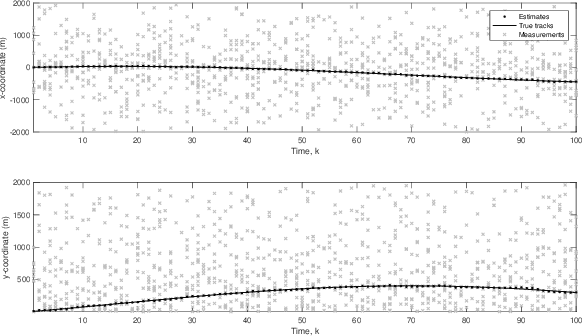
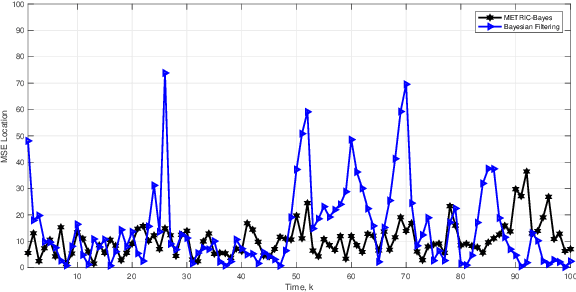
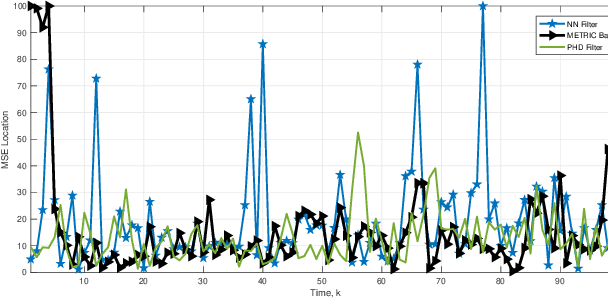
Robust tracking of a target in a clutter environment is an important and challenging task. In recent years, the nearest neighbor methods and probabilistic data association filters were proposed. However, the performance of these methods diminishes as the number of measurements increases. In this paper, we propose a robust generative approach to effectively model multiple sensor measurements for tracking a moving target in an environment with high clutter. We assume a time-dependent number of measurements that include sensor observations with unknown origin, some of which may only contain clutter with no additional information. We robustly and accurately estimate the trajectory of the moving target in a high clutter environment with an unknown number of clutters by employing Bayesian nonparametric modeling. In particular, we employ a class of joint Bayesian nonparametric models to construct the joint prior distribution of target and clutter measurements such that the conditional distributions follow a Dirichlet process. The marginalized Dirichlet process prior of the target measurements is then used in a Bayesian tracker to estimate the dynamically-varying target state. We show through experiments that the tracking performance and effectiveness of our proposed framework are increased by suppressing high clutter measurements. In addition, we show that our proposed method outperforms existing methods such as nearest neighbor and probability data association filters.