 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Detection of Non-Cooperative RISs: Scan B-Testing via Deep Support Vector Data Description
Nov 05, 2024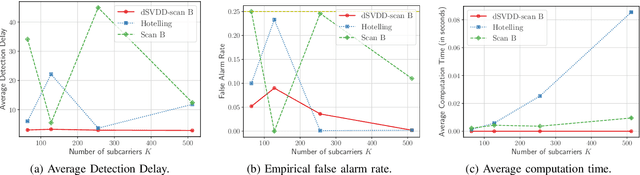
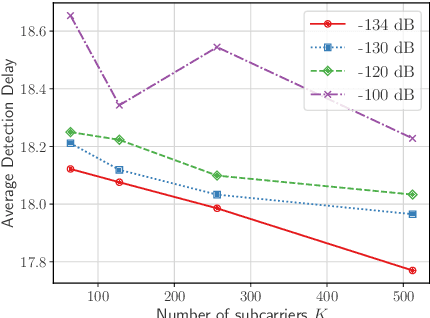
In this paper, we study the problem of promptly detecting the presence of non-cooperative activity from one or more Reconfigurable Intelligent Surfaces (RISs) with unknown characteristics lying in the vicinity of a Multiple-Input Multiple-Output (MIMO) communication system using Orthogonal Frequency-Division Multiplexing (OFDM) transmissions. We first present a novel wideband channel model incorporating RISs as well as non-reconfigurable stationary surfaces, which captures both the effect of the RIS actuation time on the channel in the frequency domain as well as the difference between changing phase configurations during or among transmissions. Considering that RISs may operate under the coordination of a third-party system, and thus, may negatively impact the communication of the intended MIMO OFDM system, we present a novel RIS activity detection framework that is unaware of the distribution of the phase configuration of any of the non-cooperative RISs. In particular, capitalizing on the knowledge of the data distribution at the multi-antenna receiver, we design a novel online change point detection statistic that combines a deep support vector data description model with the scan $B$-test. The presented numerical investigations demonstrate the improved detection accuracy as well as decreased computational complexity of the proposed RIS detection approach over existing change point detection schemes.
Device-Free 3D Drone Localization in RIS-Assisted mmWave MIMO Networks
Apr 23, 2024



In this paper, we investigate the potential of reconfigurable intelligent surfaces (RISs) in facilitating passive/device-free three-dimensional (3D) drone localization within existing cellular infrastructure operating at millimeter-wave (mmWave) frequencies and employing multiple antennas at the transceivers. The developed localization system operates in the bi-static mode without requiring direct communication between the drone and the base station. We analyze the theoretical performance limits via Fisher information analysis and Cram\'er Rao lower bounds (CRLBs). Furthermore, we develop a low-complexity yet effective drone localization algorithm based on coordinate gradient descent and examine the impact of factors such as radar cross section (RCS) of the drone and training overhead on system performance. It is demonstrated that integrating RIS yields significant benefits over its RIS-free counterpart, as evidenced by both theoretical analyses and numerical simulations.
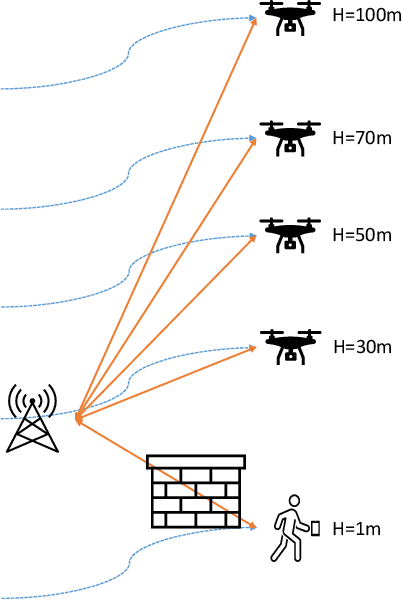
RIS-Augmented Millimeter-Wave MIMO Systems for Passive Drone Detection
Feb 11, 2024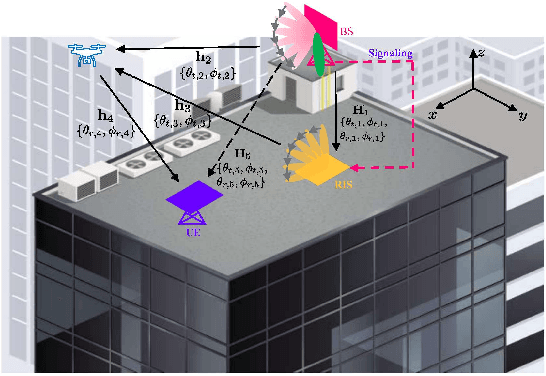

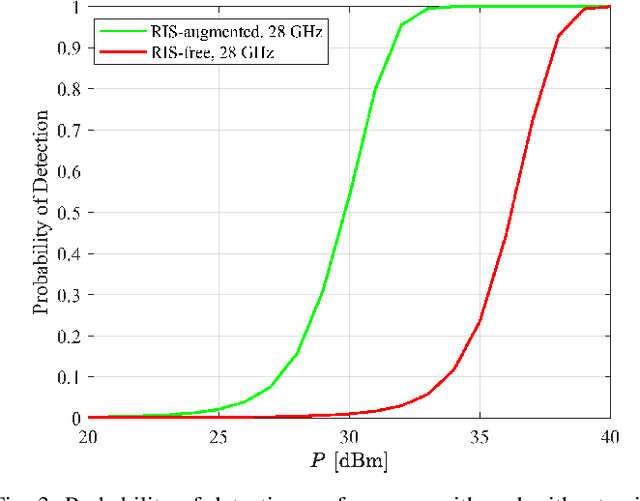
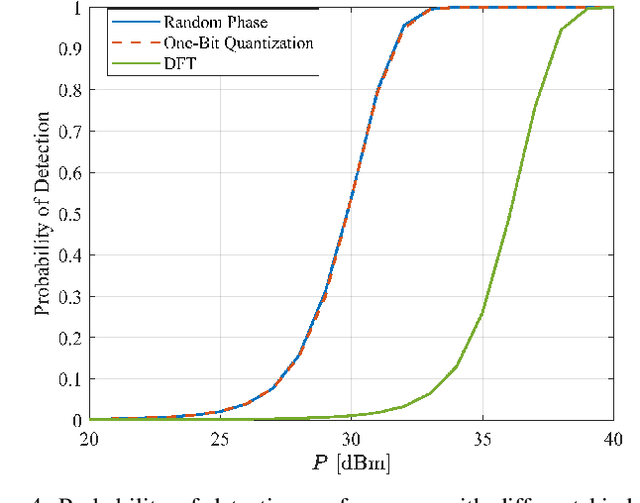
In the past decade, the number of amateur drones is increasing, and this trend is expected to continue in the future. The security issues brought by abuse and misconduct of drones become more and more severe and may incur a negative impact to the society. In this paper, we leverage existing cellular multiple-input multiple-output (MIMO) base station (BS) infrastructure, operating at millimeter wave (mmWave) frequency bands, for drone detection in a device-free manner with the aid of one reconfigurable intelligent surface (RIS), deployed in the proximity of the BS. We theoretically examine the feasibility of drone detection with the aid of the generalized likelihood ratio test (GLRT) and validate via simulations that, the optimized deployment of an RIS can bring added benefits compared to RIS-free systems. In addition, the effect of RIS training beams, training overhead, and radar cross section, is investigated in order to offer theoretical design guidance for the proposed cellular RIS-based passive drone detection system.
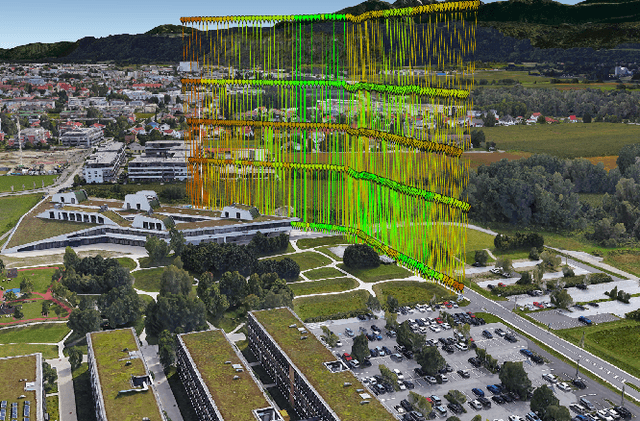
Unleashing 3D Connectivity in Beyond 5G Networks with Reconfigurable Intelligent Surfaces
May 08, 2023



Reconfigurable intelligent surfaces (RISs) bring various benefits to the current and upcoming wireless networks, including enhanced spectrum and energy efficiency, soft handover, transmission reliability, and even localization accuracy. These remarkable improvements result from the reconfigurability, programmability, and adaptation capabilities of RISs for fine-tuning radio propagation environments, which can be realized in a cost- and energy-efficient manner. In this paper, we focus on the upgrade of the existing fifth-generation (5G) cellular network with the introduction of an RIS owning a full-dimensional uniform planar array structure for unleashing advanced three-dimensional connectivity. The deployed RIS is exploited for serving unmanned aerial vehicles (UAVs) flying in the sky with ultra-high data rate, a challenging task to be achieved with conventional base stations (BSs) that are designed mainly to serve ground users. By taking into account the line-of-sight probability for the RIS-UAV and BS-UAV links, we formulate the average achievable rate, analyze the effect of environmental parameters, and make insightful performance comparisons. Simulation results show that the deployment of RISs can bring impressive gains and significantly outperform conventional RIS-free 5G networks.
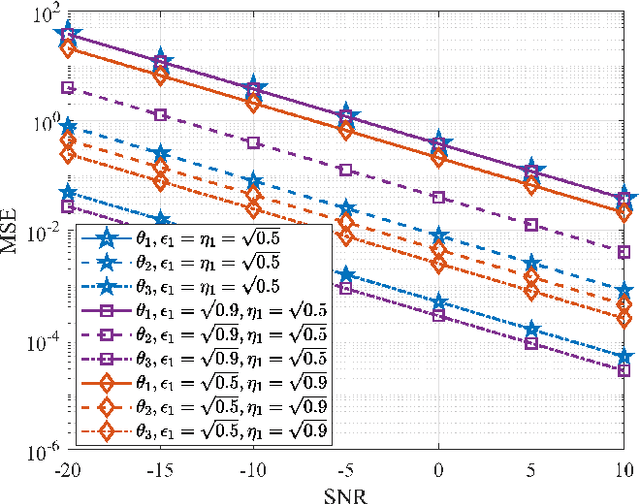
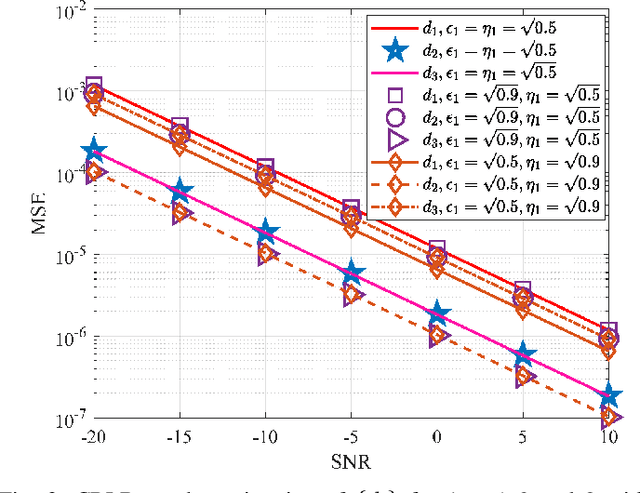
STAR-RIS-Enabled Simultaneous Indoor and Outdoor 3D Localization: Theoretical Analysis and Algorithmic Design
Feb 07, 2023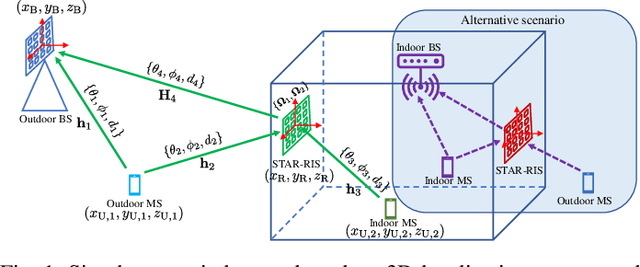
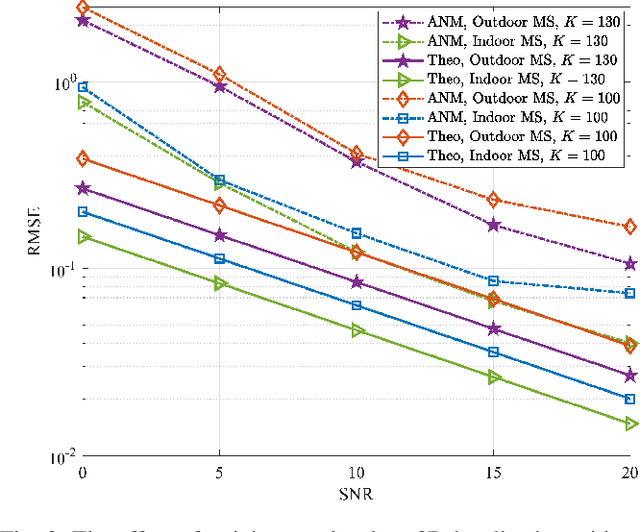
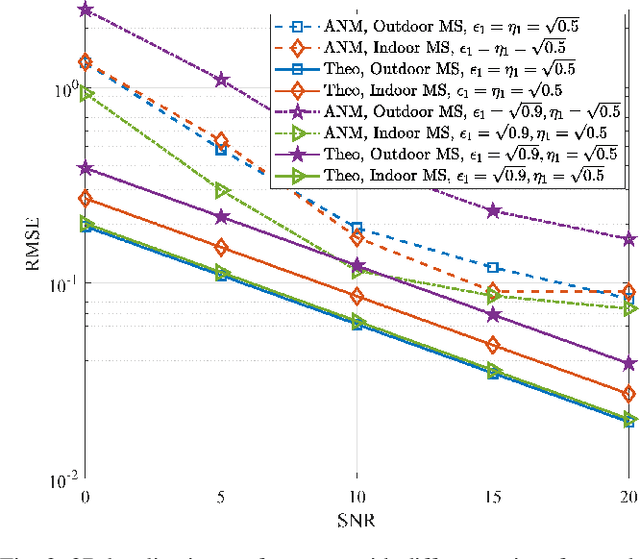
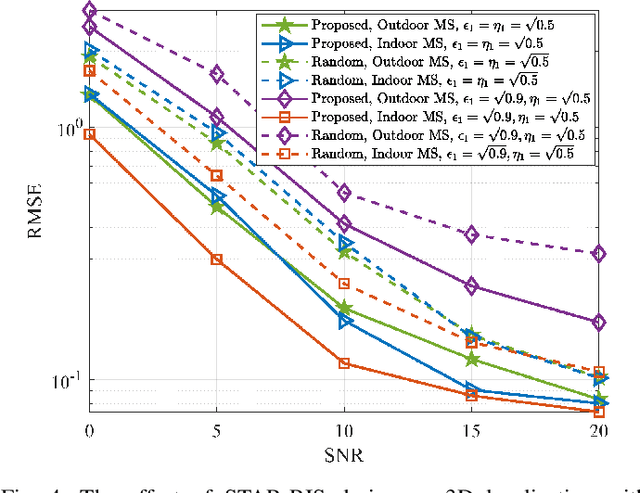
Recent research and development interests deal with metasurfaces for wireless systems beyond their consideration as intelligent tunable reflectors. Among the latest proposals is the simultaneously transmitting (a.k.a. refracting) and reflecting reconfigurable intelligent surface (STAR-RIS) which intends to enable bidirectional indoor-to-outdoor, and vice versa, communications thanks to its additional refraction capability. This double functionality provides increased flexibility in concurrently satisfying the quality-of-service requirements of users located at both sides of the metasurfaces, for example, the achievable data rate and localization accuracy. In this paper, we focus on STAR-RIS-empowered simultaneous indoor and outdoor three-dimensional (3D) localization, and study the fundamental performance limits via Fisher information analyses and Cram\'er Rao lower bounds (CRLBs). We also devise an efficient localization algorithm based on an off-grid compressive sensing (CS) technique relying on atomic norm minimization (ANM). The impact of the training overhead, the power splitting at the STAR-RIS, the power allocation between the users, the STAR-RIS size, the imperfections of the STAR-RIS-to-BS channel, as well as the role of the multi-path components on the positioning performance are assessed via extensive computer simulations. It is theoretically showcased that high-accuracy, up to centimeter level, 3D localization can be simultaneously achieved for indoor and outdoor users, which is also accomplished via the proposed ANM-based estimation algorithm.
3D Localization with a Single Partially-Connected Receiving RIS: Positioning Error Analysis and Algorithmic Design
Dec 05, 2022In this paper, we introduce the concept of partially-connected Receiving Reconfigurable Intelligent Surfaces (R-RISs), which refers to metasurfaces designed to efficiently sense electromagnetic waveforms impinging on them, and perform localization of the users emitting them. The presented R-RIS hardware architecture comprises subarrays of meta-atoms, with each of them incorporating a waveguide assigned to direct the waveforms reaching its meta-atoms to a reception Radio-Frequency (RF) chain, enabling signal/channel parameter estimation. We particularly focus on the scenarios where the user is located in the far-field of all the R-RIS subarrays, and present a three-Dimensional (3D) localization method which is based on narrowband signaling and Angle of Arrival (AoA) estimates of the impinging signals at each single-receive-RF R-RIS subarray. For the AoA estimation, which relies on spatially sampled versions of the received signals via each subarray's phase configuration of meta-atoms, we devise an off-grid atomic norm minimization approach, which is followed by subspace-based root MUltiple SIgnal Classification (MUSIC). The AoA estimates are finally combined via a least-squared line intersection method to obtain the position coordinates of a user emitting synchronized localization pilots. Our derived theoretical Cram\'er Rao Lower Bounds (CRLBs) on the estimation parameters, which are compared with extensive computer simulation results of our localization approach, verify the effectiveness of the proposed R-RIS-empowered 3D localization system, which is showcased to offer cm-level positioning accuracy. Our comprehensive performance evaluations also demonstrate the impact of various system parameters on the localization performance, namely the training overhead and the distance between the R-RIS and the user, as well as the spacing among the R-RIS's subarrays and its partitioning patterns.
Compressed-Sensing-Based 3D Localization with Distributed Passive Reconfigurable Intelligent Surfaces
Oct 27, 2022



In this paper, the programmable signal propagation paradigm, enabled by Reconfigurable Intelligent Surfaces (RISs), is exploited for high accuracy $3$-Dimensional (3D) user localization with a single multi-antenna base station. Capitalizing on the tunable reflection capability of passive RISs, we present a two-stage user localization method leveraging the multi-reflection wireless environment. In the first stage, we deploy an off-grid compressive sensing approach, which is based on the atomic norm minimization, for estimating the angles of arrival associated with each RIS, which is followed, in the second stage, by a maximum likelihood location estimation initialized with a least-squares line intersection technique. The presented numerical results showcase the high accuracy of the proposed 3D localization method, verifying our theoretical Cram\'er Rao lower bound analysis.
Joint Channel and Direction Estimation for Ground-to-UAV Communications Enabled by A Simultaneous Reflecting and Sensing RIS
Oct 27, 2022Hybrid Reconfigurable Intelligent Surfaces (HRISs), which are capable of simultaneous programmable reflections and sensing, are expected to play a significant role in future wireless networks, enabling various Integrated Sensing and Communication (ISAC) applications. In this paper, we focus on HRIS-enabled Unmanned Aerial Vehicle (UAV) networks and design the HRIS parameters (phase profile, reception combining, and the power splitting between the two functionalities) for jointly estimating the individual UAV-HRIS and HRIS-base-station channels as well as the Angle of Arrival (AoA) of the Line-of-Sight (LoS) component of the UAV-HRIS channel. We derive the Cram\'er Rao lower bounds for the estimated channels and evaluate the performance of the proposed approach in terms of the channel estimation error and the LoS AoA estimation accuracy, verifying its effectiveness for HRIS-enabled ground-to-UAV wireless communication systems.
Simultaneous Indoor and Outdoor 3D Localization with STAR-RIS-Assisted Millimeter Wave Systems
Jul 19, 2022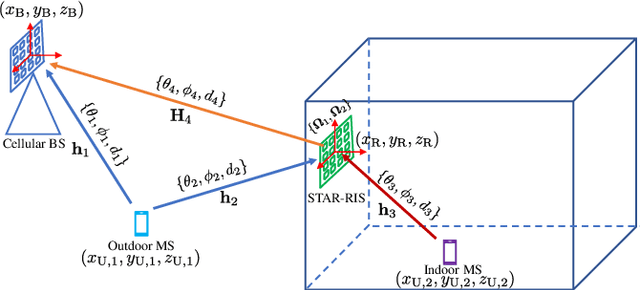
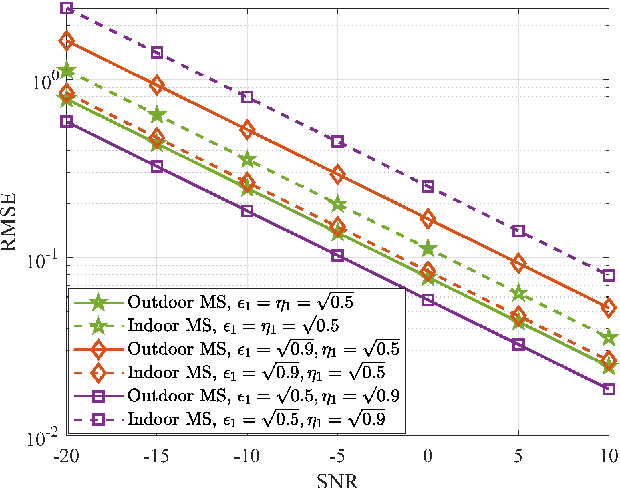
Simultaneously transmitting (refracting) and reflecting reconfigurable intelligent surfaces (STAR-RISs) have been recently identified to improve the spectrum/energy efficiency and extend the communication range. However, their potential for enhanced concurrent indoor and outdoor localization has not yet been explored. In this paper, we study the fundamental limits, i.e., the Cram\'er Rao lower bounds (CRLBs) via Fisher information analyses, on the three-dimensional (3D) localization performance with a STAR-RIS at millimeter wave frequencies. The effect of the power splitting between refraction and reflection at the STAR-RIS as well as the power allocation between the two mobile stations (MSs) are investigated. By maximizing the principal angle between the two subspaces corresponding to the STAR-RIS reflection and refraction matrices, we are able to find the optimal solutions for these simultaneous operations. We verify that high-accuracy 3D localization can be achieved for both indoor and outdoor MSs when the system parameters are well optimized.
An Experimental Analysis on Drone-Mounted Access Points for Improved Latency-Reliability
Jun 30, 2021

The anticipated densification of contemporary communications infrastructure expects the use of drone small cells (DSCs). Thus, we experimentally evaluate the capability of providing local and personalized coverage with a drone mounted Wi-Fi access point that uses the nearby LTE infrastructure as a backhaul in areas with mixed line of sight(LoS) and Non-LoS (NLoS) links to the local cellular infrastructure. To assess the potential of DSCs for reliable and low latency communication of outdoor users, we measure the channel quality and the total round trip latency of the system. For a drone following the ground user, the DSC-provided network extends the coverage for an extra 6.4% when compared to the classical LTE-direct link. Moreover, the DSC setup provides latencies that are consistently smaller than 50 msfor 95% of the experiment. Within the coverage of the LTE-direct connection, we observed a latency ceiling of 120ms for 95% reliability of the LTE-direct connection. The highest latency observed for the DSC system was 1200ms, while the LTE-direct link never exceeded 500 ms. As such, DSC setups are not only essential in NLoS situations, but consistently improve the latency of users in outdoor scenarios.