 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSustainable Wireless Services with UAV Swarms Tailored to Renewable Energy Sources
Nov 23, 2022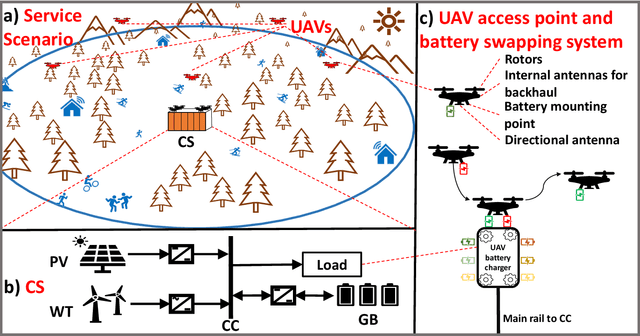
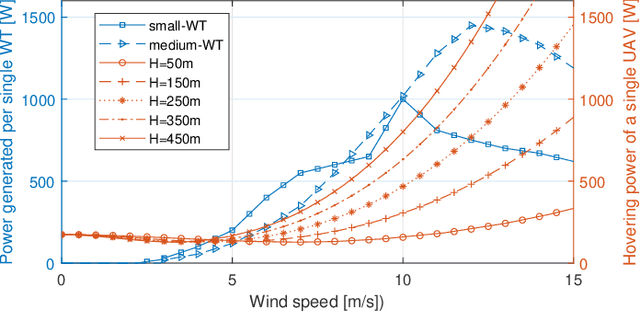
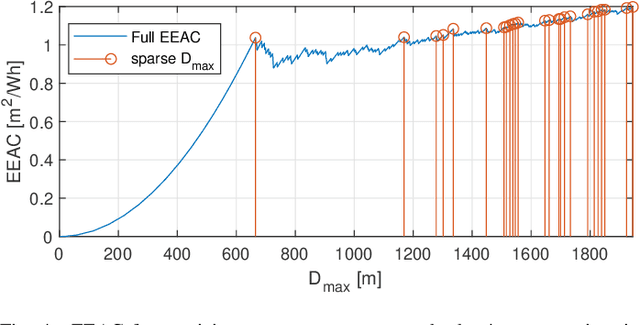
Unmanned Aerial Vehicle (UAV) swarms are often required in off-grid scenarios, such as disaster-struck, war-torn or rural areas, where the UAVs have no access to the power grid and instead rely on renewable energy. Considering a main battery fed from two renewable sources, wind and solar, we scale such a system based on the financial budget, environmental characteristics, and seasonal variations. Interestingly, the source of energy is correlated with the energy expenditure of the UAVs, since strong winds cause UAV hovering to become increasingly energy-hungry. The aim is to maximize the cost efficiency of coverage at a particular location, which is a combinatorial optimization problem for dimensioning of the multivariate energy generation system under non-convex criteria. We have devised a customized algorithm by lowering the processing complexity and reducing the solution space through sampling. Evaluation is done with condensed real-world data on wind, solar energy, and traffic load per unit area, driven by vendor-provided prices. The implementation was tested in four locations, with varying wind or solar intensity. The best results were achieved in locations with mild wind presence and strong solar irradiation, while locations with strong winds and low solar intensity require higher Capital Expenditure (CAPEX) allocation.
Fairness Based Energy-Efficient 3D Path Planning of a Portable Access Point: A Deep Reinforcement Learning Approach
Aug 10, 2022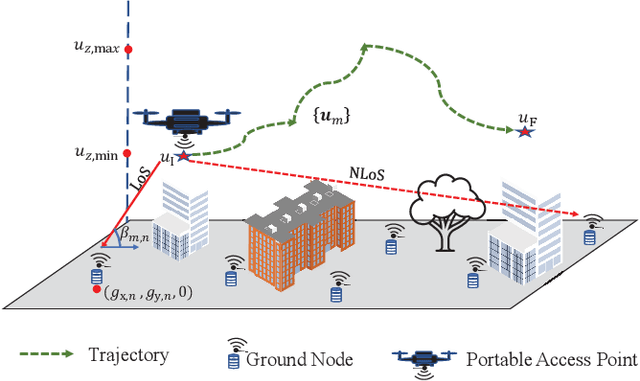
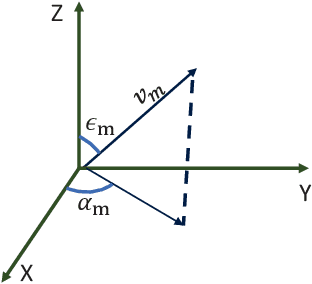
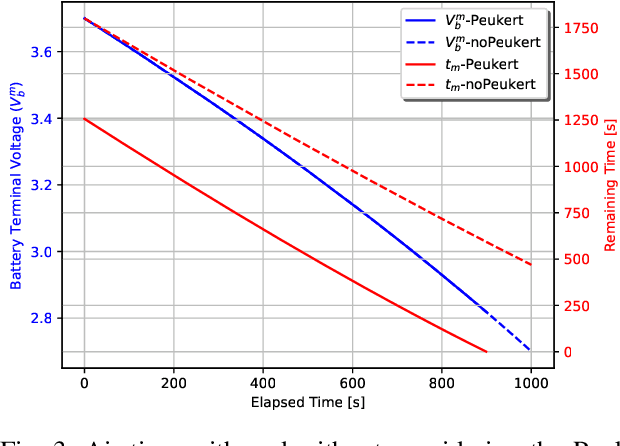
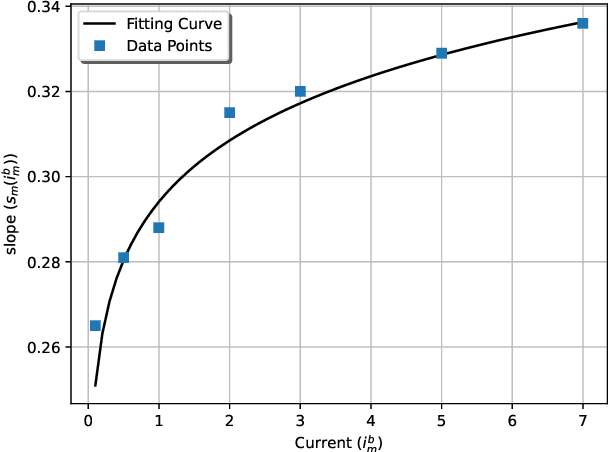
In this work, we optimize the 3D trajectory of an unmanned aerial vehicle (UAV)-based portable access point (PAP) that provides wireless services to a set of ground nodes (GNs). Moreover, as per the Peukert effect, we consider pragmatic non-linear battery discharge for the battery of the UAV. Thus, we formulate the problem in a novel manner that represents the maximization of a fairness-based energy efficiency metric and is named fair energy efficiency (FEE). The FEE metric defines a system that lays importance on both the per-user service fairness and the energy efficiency of the PAP. The formulated problem takes the form of a non-convex problem with non-tractable constraints. To obtain a solution, we represent the problem as a Markov Decision Process (MDP) with continuous state and action spaces. Considering the complexity of the solution space, we use the twin delayed deep deterministic policy gradient (TD3) actor-critic deep reinforcement learning (DRL) framework to learn a policy that maximizes the FEE of the system. We perform two types of RL training to exhibit the effectiveness of our approach: the first (offline) approach keeps the positions of the GNs the same throughout the training phase; the second approach generalizes the learned policy to any arrangement of GNs by changing the positions of GNs after each training episode. Numerical evaluations show that neglecting the Peukert effect overestimates the air-time of the PAP and can be addressed by optimally selecting the PAP's flying speed. Moreover, the user fairness, energy efficiency, and hence the FEE value of the system can be improved by efficiently moving the PAP above the GNs. As such, we notice massive FEE improvements over baseline scenarios of up to 88.31%, 272.34%, and 318.13% for suburban, urban, and dense urban environments, respectively.
On Addressing Heterogeneity in Federated Learning for Autonomous Vehicles Connected to a Drone Orchestrator
Aug 05, 2021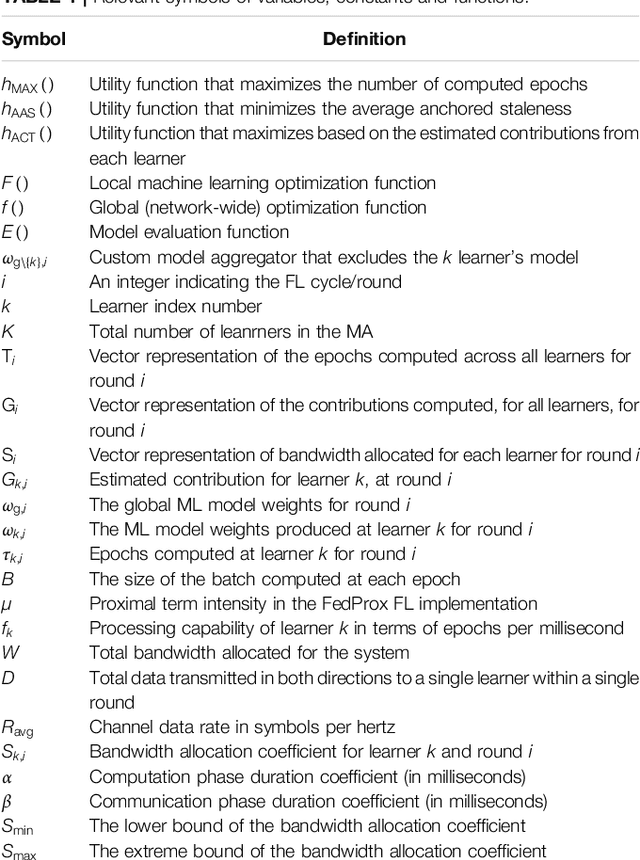
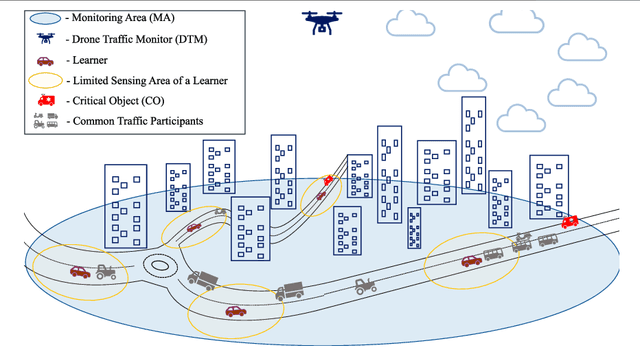
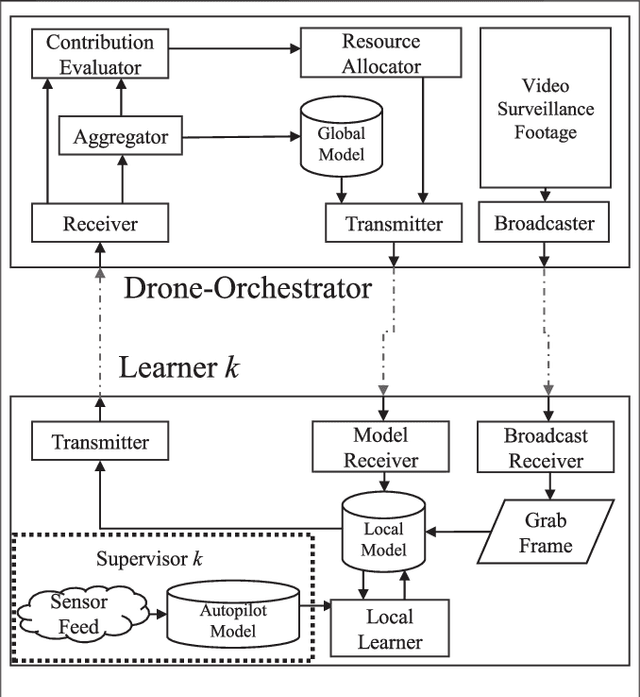
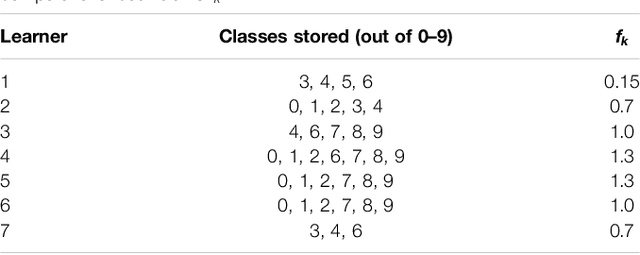
In this paper we envision a federated learning (FL) scenario in service of amending the performance of autonomous road vehicles, through a drone traffic monitor (DTM), that also acts as an orchestrator. Expecting non-IID data distribution, we focus on the issue of accelerating the learning of a particular class of critical object (CO), that may harm the nominal operation of an autonomous vehicle. This can be done through proper allocation of the wireless resources for addressing learner and data heterogeneity. Thus, we propose a reactive method for the allocation of wireless resources, that happens dynamically each FL round, and is based on each learner's contribution to the general model. In addition to this, we explore the use of static methods that remain constant across all rounds. Since we expect partial work from each learner, we use the FedProx FL algorithm, in the task of computer vision. For testing, we construct a non-IID data distribution of the MNIST and FMNIST datasets among four types of learners, in scenarios that represent the quickly changing environment. The results show that proactive measures are effective and versatile at improving system accuracy, and quickly learning the CO class when underrepresented in the network. Furthermore, the experiments show a tradeoff between FedProx intensity and resource allocation efforts. Nonetheless, a well adjusted FedProx local optimizer allows for an even better overall accuracy, particularly when using deeper neural network (NN) implementations.
An Experimental Analysis on Drone-Mounted Access Points for Improved Latency-Reliability
Jun 30, 2021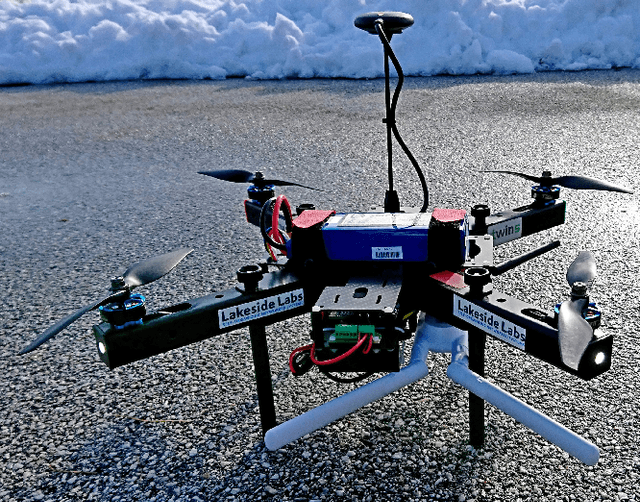

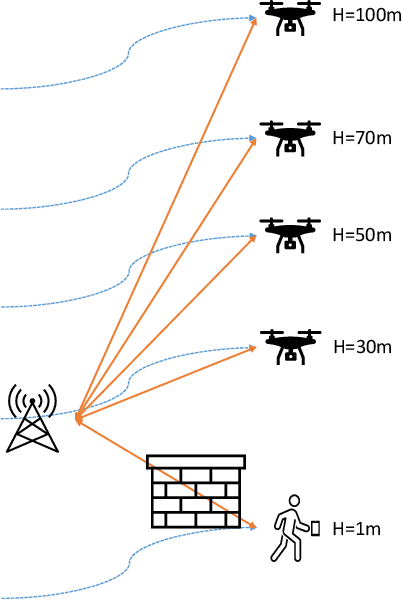
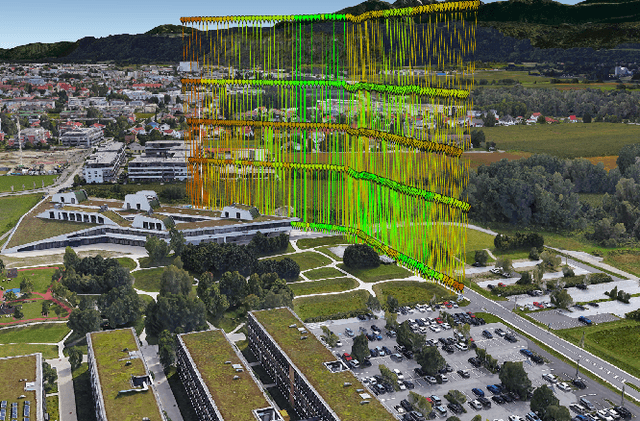
The anticipated densification of contemporary communications infrastructure expects the use of drone small cells (DSCs). Thus, we experimentally evaluate the capability of providing local and personalized coverage with a drone mounted Wi-Fi access point that uses the nearby LTE infrastructure as a backhaul in areas with mixed line of sight(LoS) and Non-LoS (NLoS) links to the local cellular infrastructure. To assess the potential of DSCs for reliable and low latency communication of outdoor users, we measure the channel quality and the total round trip latency of the system. For a drone following the ground user, the DSC-provided network extends the coverage for an extra 6.4% when compared to the classical LTE-direct link. Moreover, the DSC setup provides latencies that are consistently smaller than 50 msfor 95% of the experiment. Within the coverage of the LTE-direct connection, we observed a latency ceiling of 120ms for 95% reliability of the LTE-direct connection. The highest latency observed for the DSC system was 1200ms, while the LTE-direct link never exceeded 500 ms. As such, DSC setups are not only essential in NLoS situations, but consistently improve the latency of users in outdoor scenarios.
Standalone Deployment of a Dynamic Drone Cell for Wireless Connectivity of Two Services
Jan 24, 2021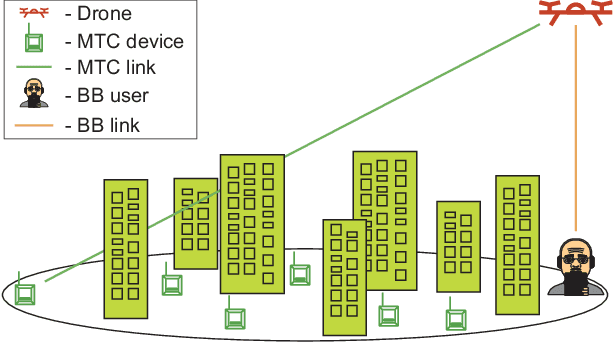
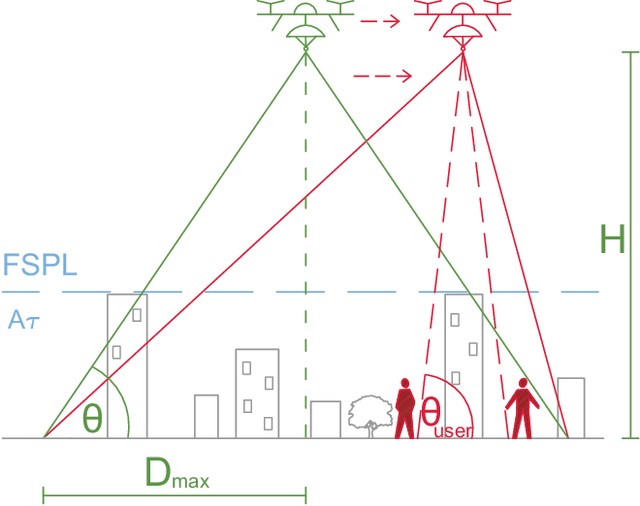
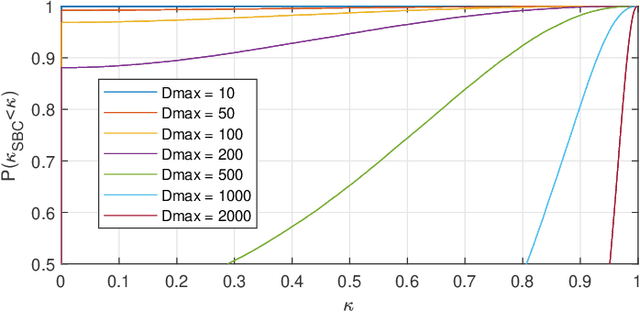
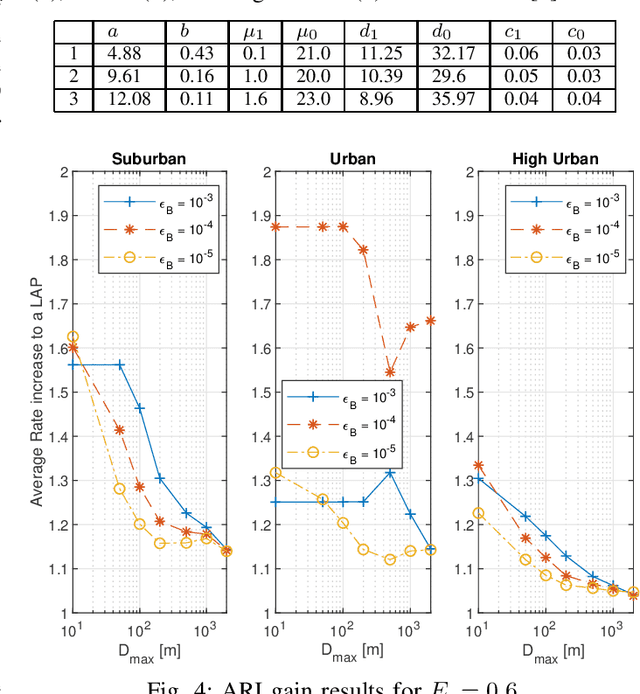
We treat a setting in which two priority wireless service classes are offered in a given area by a drone small cell (DSC). Specifically, we consider broadband (BB) user with high priority and reliability requirements that coexists with random access machine-type-communications (MTC) devices. The drone serves both connectivity types with a combination of orthogonal slicing of the wireless resources and dynamic horizontal opportunistic positioning (D-HOP). We treat the D-HOP as a computational geometry function over stochastic BB user locations which requires careful adjustment in the deployment parameters to ensure MTC service at all times. Using an information theoretic approach, we optimize DSC deployment properties and radio resource allocation for the purpose of maximizing the average rate of BB users. While respecting the strict dual service requirements we analyze how system performance is affected by stochastic user positioning and density, topology, and reliability constraints combinations. The numerical results show that this approach outperforms static DSCs that fit the same coverage constraints, with outstanding performance in the urban setting.